李德毅院士新书聚焦认知工程,以无人驾驶解释机器认知与具身智能的未来路径。
原文标题:李德毅院士新著《认知工程——李德毅学术思想文选》重磅发布
原文作者:数据派THU
冷月清谈:
怜星夜思:
2、无人驾驶里提到的“负学习”,也就是从事故和错误中学习,你觉得会比从优秀司机那里学习更重要吗?
3、文章把无人驾驶看作认知工程的最佳实践场景,你觉得还有哪些行业也适合验证“认知机器”?
4、如果未来机器真的具备自成长能力,人类应该更关注技术上限,还是更关注责任边界?
原文内容

新书发布
近日,中国工程院院士李德毅的新作《认知工程——李德毅学术思想文选》于第十四届中国指挥控制大会重磅发布。李德毅院士、武汉大学出版社社长吴江、清华大学出版社总编辑卢先和、中国指挥与控制学会秘书长刘玉超、中国人工智能学会副秘书长何雯共同登台点亮发布仪式。李德毅院士结合本书的创作过程,分享了创新的乐趣与感想。

发布仪式结束后,李德毅院士在会议现场开展了新书签名活动。他亲切地与嘉宾、学者交流互动与合照,并不时在签名扉页上寄语勉励,现场学术氛围浓厚,气氛热烈。
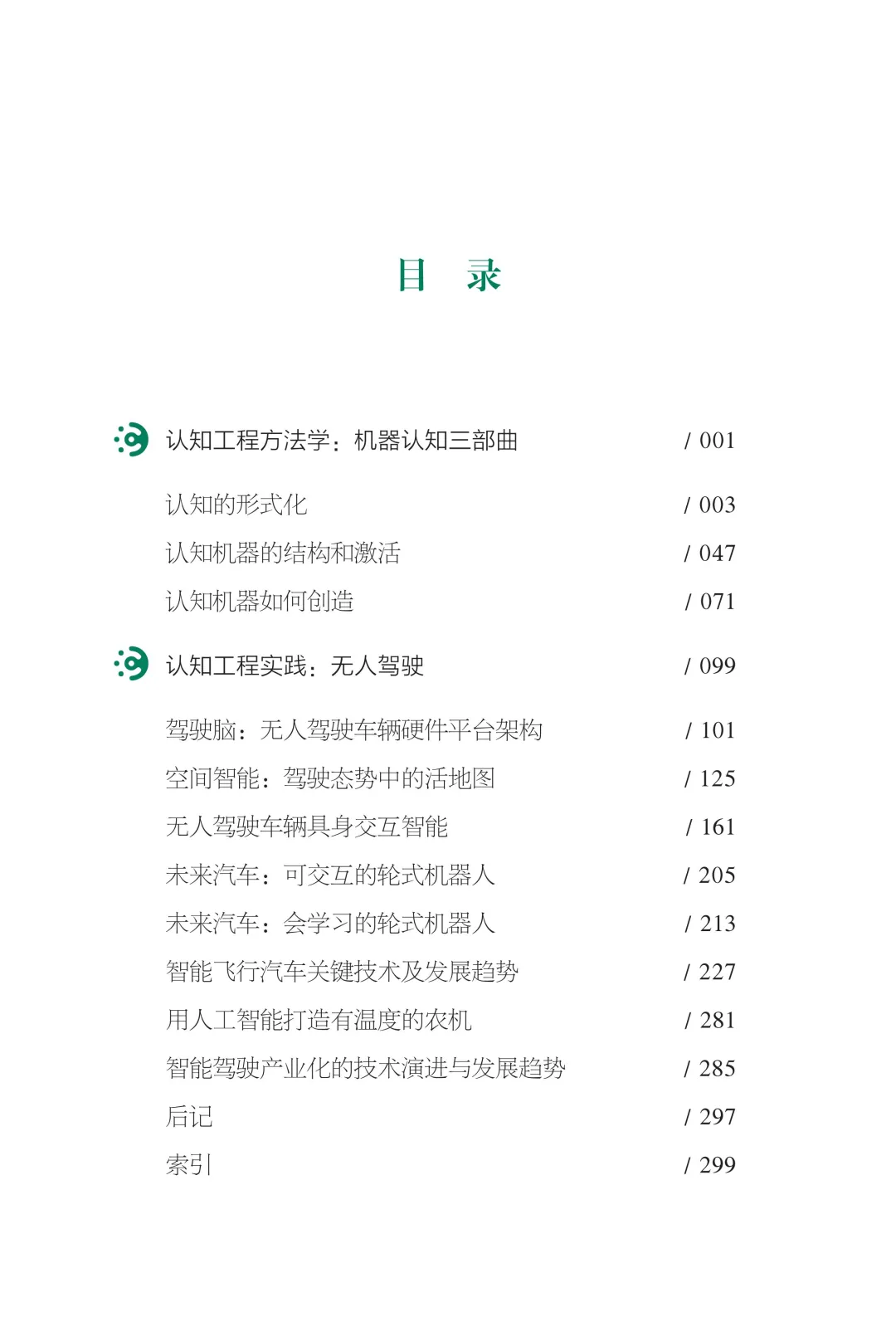
本书目录
认知破界,智见未来
读《认知工程——李德毅学术思想文选》有感
人类对智能的追问从未停止。我们制造工具,工具反过来重塑我们;我们试图让机器像人一样思考,却在过程中不断重新认识自己。当一辆无人驾驶的卡车在秒级时间内自行规避一场侧翻事故,当一台农机在西南丘陵间精准作业、无需人耕,我们不禁要问:机器真的能“认知”吗?机器智能的本质是什么?人机共生的未来又将是何种图景?
这本书给出了一个极具魄力的回答:“人的认知与机器认知,物理同源,数学同构。”这一观点从根源上打通了生命智能与人工智能的壁垒。这意味着,认知不是生命的专属,而是可以被抽取、被建模、被机器再现的客观规律。这本书没有给出玄奥的哲学思辨,而是用一套完整的认知工程方法论和无人驾驶的工程实践一步步向我们证明:认知可以被形式化,智能可以被建构,我们将迈向各智其智、智人之智、智智与共、人机协同的未来。
一、认知的形式化:智能可被统一建模
《认知工程》最具奠基性的观点,是提出人类一切认知活动都可以被形式化。书中指出,认知并非抽象玄思,而是遵循“感知—思维—行为—再感知”的螺旋上升过程,并可以被归纳为四种稳定、可复现、可工程实现的基本模式,四种模式使用的频度不同,且相互之间的切换带有不确定性,却构成了趋于统一的“无尽认知”。这一论断从根源上证明:认知不是生命专属,而是可以被抽取、被建模、被机器再现的。
认知的形式化,让智能从哲学思辨走向科学体系。记忆驱动、知识驱动、联想驱动、假设驱动四种模式,覆盖了人类从经验、推理、创造到发现的全部认知行为。它们彼此切换,相互补充,为人工智能提供了可直接落地的理论根基,让机器拥有了真正意义上的“类人认知”可能。这正是“物理同源,数学同构”在方法论层面的具体展开。
二、认知机器的架构:以记忆、计算与交互为核心的全新范式
本书最具突破性的贡献,是提出区别于冯・诺依曼结构的认知机器新架构。传统计算机重计算、轻记忆、弱交互,而认知机器以“瞬时记忆—工作记忆—长期记忆”为核心,通过智痕元胞网络模拟人脑记忆的形成、激活与遗忘机制,让智能从“计算”转向“认知”。
书中提出“智痕元胞”的概念:它不是传统的神经网络节点,而是寄生在“物质硬构体”之上的“思维软构体”——可以理解为机器版的“记忆痕迹”,每一次学习都会在这些元胞上留下或深或浅的印记。智痕可深可浅,连接有强有弱,构成一个具有小世界特征、无标度的复杂记忆网络。记忆提取的是这个网络不同尺度的整体具象,有时甚至是涌现。这让我重新理解了“记忆”与“智能”的关系。我们常说“举一反三”,背后正是记忆驱动的联想。老司机开车不需要每次重新计算,因为记忆已将经验内化为本能。
认知机器的另一核心是具身交互,是机器迈向具身智能的物理前提。机器不再是孤立运算,而是通过感知、决策、行为的闭环与物理世界深度互动,形成可学习、可纠错、可成长的智能体。无论是虚拟机器人还是实体装备,这一架构都能通用支撑,使机器真正从“执行工具”升级为“认知主体”。
三、认知工程的实践:无人驾驶是认知落地的最佳载体
驾驶认知是认知工程最理想的试验场。无人驾驶不是简单的自动控制,而是完整的认知闭环:多传感器跨模态感知、驾驶态势实时融合、路权动态判断、行为自主决策、车辆精准执行,构成一套完整的认知工程范例。以“驾驶脑”为核心的硬件架构、随车而动的“活地图”空间智能、基于“观察—判断—决策—行动”循环的实时决策系统,共同让无人车成为可交互、会学习、自成长的轮式机器人。京津高速无人驾驶等真实工程案例,印证了认知工程从理论到实践的巨大力量。
最令人印象深刻的是书中提出的“负学习”这个概念。传统机器学习的逻辑是“正学习”——从正确样本中学习“怎么做”。机器需要海量标注数据,一遍遍模仿标杆驾驶员的正确操作:如何跟车、如何变道、如何超车。这条路已经被证明有效,但它有一个根本性的局限:正确的操作是有限的,而错误和意外是无尽的。本书提出了一个颠覆性的思路:让机器向事故驾驶员学习,从事故中汲取教训。
以车辆侧翻为例,事故评估专家通过反复复现事故场景,捕捉到关键的“黄金一秒期”:若能在紧急突发情况前后的的“黄金一秒期”内实施理性干预,即可有效规避事故。对驾驶脑而言,这一秒可以被“慢动作”解析——若以100毫秒为采样周期,系统足以捕获十个驾驶工况切片,并相应执行十次决策干预。在生死攸关的瞬间,人类驾驶员常因惊恐而丧失理性决策能力,难以在极短时间内做出正确判断。但机器不同,把事故专家的群体智慧浓缩进驾驶脑,让机器在面对极端工况时能够以远超人类的反应速度和精准度做出正确决策。这不是用机器替代人类,而是在人类力所不及的领域超越人类。 机器没有情绪波动,没有恐惧与犹豫,它只关注一个问题:如何用最优解让车辆脱离险境。机器不是人类的对手,而是人类能力的延伸——在人类惊恐失措的瞬间,它冷静地伸出援手。这或许就是认知工程最动人的地方。
四、认知的动力:学科交叉是突破认知边界的唯一路径
理解了认知如何被形式化、认知机器如何构建以及如何落地实践,顺着本书这条从理论到工程的脉络,一个更深层的问题浮现出来:究竟是什么力量,支撑着这套认知工程体系从无到有、从抽象到具体?
真正的认知突破,必然来自跨学科的思想融合。认知工程本身就是认知科学、物理学、计算机科学、控制工程、脑科学交叉的产物。李德毅学术思想文选由中国人工智能学会理事长戴琼海院士、中国计算机学会理事长李国杰院士、中国自动化学会理事长郑南宁院士分别作序,就是证明。单一学科只能看到智能的碎片,只有跨界融合,才能揭示 “物质、能量、结构、时间” 四要素统一的认知本质,物质和能量是物理层面的真实存在,结构和时间是认知层面的抽象思维,这四者共同构成了人类智能和机器智能的共同基石和底层逻辑。从符号主义的抽象、连接主义的联想,到行为主义的交互,三大学派在认知工程框架下实现统一。这种跨界思维告诉我们:未来的创新不仅来自学科内部深耕,更来自边界打破、思想碰撞、方法迁移,认知科学成为引领AI发展的底层动力。
五、认知的未来:走向可交互、会学习、自成长的具身智能
认知的形式化是起点,认知机器是载体,无人驾驶实践是试验场,学科交叉是动力源泉,解决了“是什么”“怎么建”“怎么用”“从哪来”的问题,这一切又会将人类和机器带向什么样的未来?本书为人工智能指明了清晰方向:具身智能是所有人工智能研究的出发点,也是最终的归宿。机器不再只停留在屏幕对话,而是从语言交互走向物理世界的真实认知,进入物理空间,感知环境、理解态势、自主决策、持续进化。未来的认知机器,不必全都外形拟人,但必须具备认知能力;不必全能,但必须可交互、会学习、自成长。
书中描绘了一个更具想象力的图景:认知机器可以和科学家、艺术家、工程师一起作出发明、发现和创造,人类不再纠结创造的主体是人类还是机器。人的智能和机器智能,个体智能和群体智能一次次地迭代、发展,各智其智,智人之智,智智与共,兼容并蓄,没有尽头。人机关系走向一种全新的协同未来:人类负责想象、创造与价值判断,机器负责计算、持续推演与精准执行。认知工程,正是开启这一未来的钥匙。
合上书,我想起李院士在后记中写的那句话:“如果有一天,当你偶然看到一辆无人驾驶的卡车躲开了一次侧翻事故,用单侧车轮如同自行车一样前行,然后化危为安的时候,你会相信无人驾驶真的可以比人强,机器认知真的可以比人强。”
认知破界,智见未来。这本书让我相信:那个时刻,正在到来。
点击封面即可购书
