浙大团队开源InSpatio-World,登顶权威世界模型榜单!低成本实现实时交互4D世界,AI从感知到重构物理世界。
原文标题:登顶全球权威榜单!浙大创业团队百卡打造开源实时世界模型,视频秒变可交互4D世界
原文作者:机器之心
冷月清谈:
怜星夜思:
2、文章提到InSpatio-World在自动驾驶、VR/AR和具身智能等领域有应用前景,你认为在这些领域中,哪一个最有可能率先实现大规模落地?为什么?
3、InSpatio-World 展示了中国团队在世界模型领域的实力,你认为中国AI团队在世界模型领域有哪些优势和劣势?
原文内容
过去一年,全球科技界正开启一场关于「世界模型」的豪赌。
从李飞飞 World Labs 的百亿美元估值神话,到 Yann LeCun 创下纪录的 10.3 亿美元种子轮,再到 Google 与 NVIDIA 倾注海量算力的资源博弈 —— 资本与天才们正押注同一个未来:AI 终将走出屏幕,理解并重构物理世界。
所谓世界模型,是 AI 的「内生物理引擎」。它要求 AI 像人类一样理解三维空间、记忆物体状态并预测物理演变。然而,目前主流模型大多只是在「画」像素而非「懂」物理,一旦涉及复杂交互,逻辑便会崩塌。若无法从「视觉生成」跨越到「物理感知」,AI 就永远无法在现实世界中自由行动。
但拐点比想象中来得更快。就在全球算力竞赛陷入「像素瓶颈」的僵局时,浙大系初创公司影溯(InSpatio)给出了破局答案。
近日,影溯正式发布并开源世界模型 InSpatio-World,综合性能优异,在李飞飞牵头的权威世界模型榜单 WorldScore-Dynamic 中,力压其他实时 / 交互级推理速度的世界模型。它彻底摒弃了烧钱低效的纯 2D 视频路径,凭借更具第一性原理的 3D 空间架构,带来了可实时交互的动态世界。
更令行业震撼的是其「效率奇迹」:仅用数百万元的训练成本(并非一次训练,而是研发全周期的训练迭代),便在核心指标上反超同类 AI 巨头的模型,而且在单张专业级显卡上实现 24FPS 的推理速度!
这标志着,在世界模型的技术博弈中,国内团队不仅杀回了牌桌,更直接打出了「王炸」。 相比 2D 路径动辄数亿的资源黑洞,影溯用实战证明了 3D 路径近乎碾压的代际效率优势。
-
模型演示:world.inspatio.com
-
项目主页:https://inspatio.github.io/inspatio-world/
-
代码主页:https://github.com/inspatio/inspatio-world
-
官网链接:https://www.inspatio.com/
项目发布后迅速引发硅谷 AI 圈层关注,多位意见领袖相继转发;NeRF 原始论文共同作者、Google DeepMind 首席研究科学家 Jon Barron 也在第一时间参与传播。
范式突破,国内创业团队登顶实时世界模型榜首
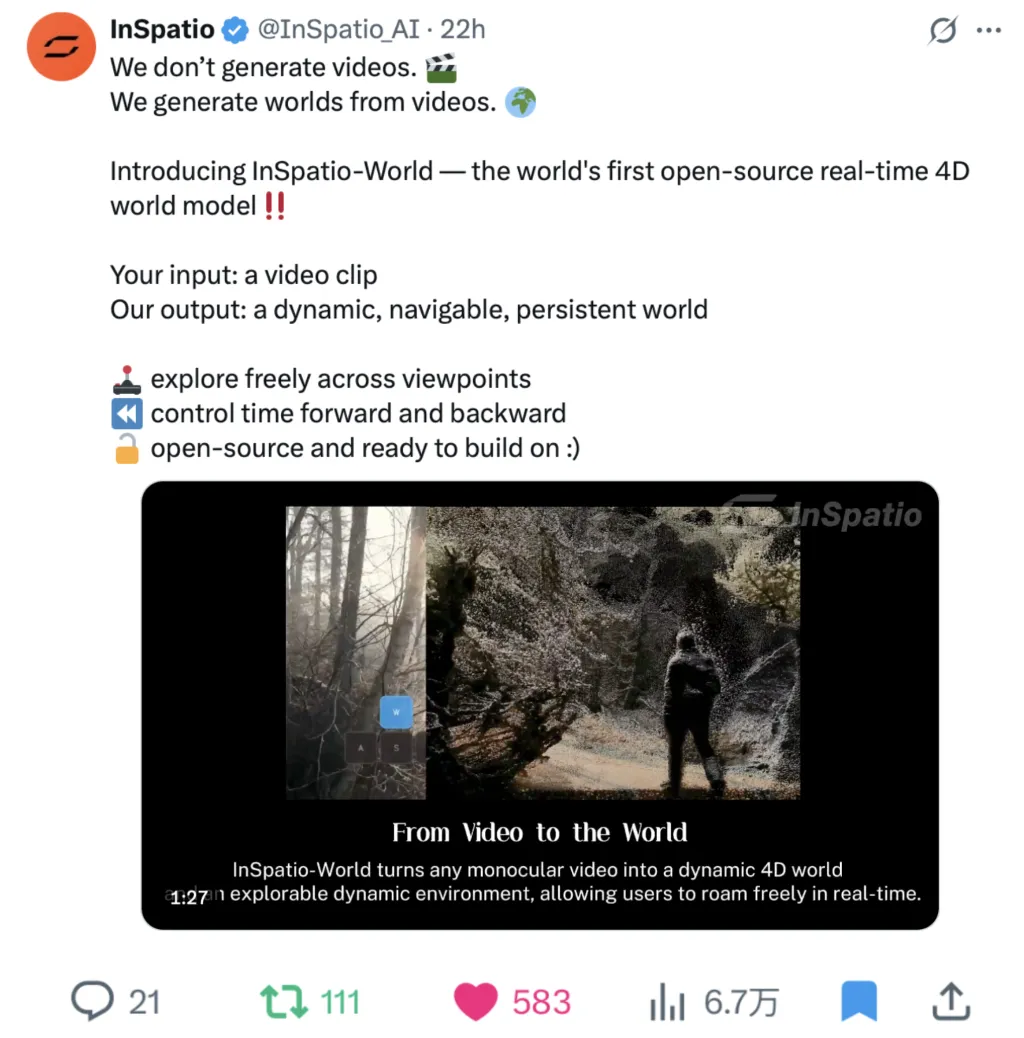
只需一段普通单目视频,InSpatio-World 即可「复活」一个鲜活的 4D 世界。
它让 4D 建模彻底走出实验室,将日常影像重塑为可反复进入、沉浸体验的立体记忆空间,使平面的像素跃升为跨越时空的数字现实。
不仅如此,凭借强大的实时仿真能力,它正成为具身智能与自动驾驶非常理想、有效的虚拟训练场。从重塑时空到赋能产业,InSpatio-World 正在定义下一代可交互数字资产。
特别令人兴奋的是,相比以往的世界模型,InSpatio-World 对算力的要求大幅降低:仅需百卡级别的算力即可完成快速训练,甚至在单张 RTX 4090 显卡上就能实现 10 FPS 的流畅推理,极大打开了商业化落地的想象空间。
除了惊艳的实际效果,在 WorldScore-Dynamic Benchmark 的最新评测中,最小参数规模版本的 InSpatio-World 已经力压群雄,在实时 / 交互级世界模型中位居榜首。
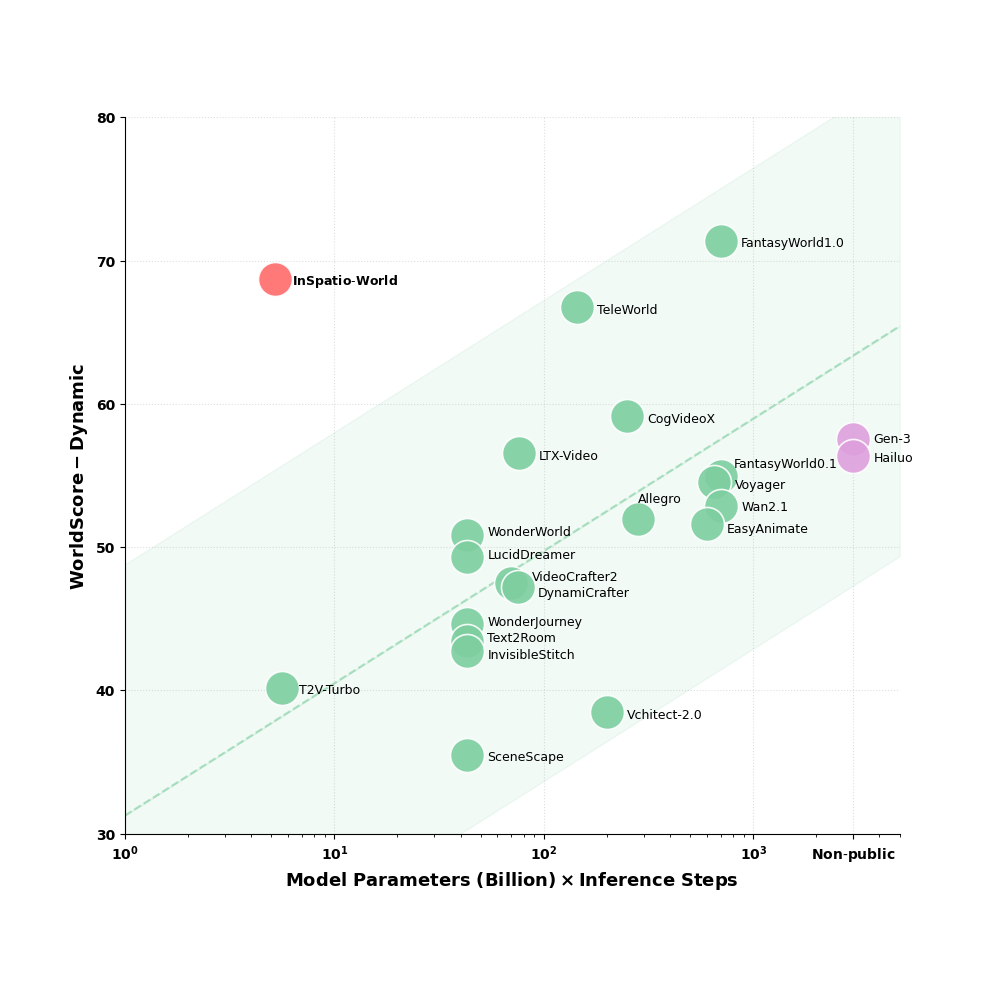
这次「以小搏大」的夺冠,标志着世界模型赛道的两大底层突破:
-
架构胜过规模: 在动辄千亿参数的暴力美学竞赛中,小参数模型凭借架构优势逆袭,证明了建模范式远比规模堆叠更重要;
-
从「像素生成」到「实时仿真」:InSpatio-World 交付的不再是静态、单向的视频切片,而是一个响应式、可交互的「鲜活世界」,实现了从像素复现到实时状态模拟的跨代飞跃。
最颠覆之处在于,InSpatio-World 极大地降低了物理世界的数字化门槛。它摆脱了昂贵的专业设备与冗长的渲染等待,让「瞬时建模」的愿景变得触手可及。
技术路径:以三维为锚点,表征世界
世界模型的核心目标,是通过预测下一时刻的世界状态,使 AI 具备对空间与动态的理解能力。
但在「如何表征世界」上,行业存在根本分歧:
-
2D 路线(如 NVIDIA 的 Cosmos、Google 的 Genie 系列)
通过海量视频进行「视觉统计」学习。优势在于数据红利极度充裕,但由于缺乏显式几何约束,模型往往在处理复杂遮挡、大尺度相机运动或长程演化时,出现物理一致性坍塌(如物体凭空消失或变形)。
-
3D 路线(如 World Labs 的 Marble 以及 RTFM 模型)
坚持「空间结构」直接建模。其基本判断是:若 AI 终将介入物理世界,其内部表征必须是三维的。 这种路径天然具备空间一致性与可解释性,但长期被困于 “高质量 3D 数据稀缺” 的泥潭。
这一分歧的本质在于,是从「视觉统计」逼近世界,还是从「空间结构」直接建模世界。
而影溯选择了一条更具挑战性的路径:将海量 2D 视频转化为可学习的 3D 动态表示。 这一思路巧妙地绕过了数据瓶颈,实现了从 InSpatio-WorldFM(静态 3D 世界重建)到 InSpatio-World(动态 4D 世界演化)的跨越。
除了在数据获取上的创新思路,影溯的另一突破在于提出了状态锚定世界建模(State-Anchored World Modeling)范式,实现了世界模型从视觉模拟向物理仿真的本质跨越。
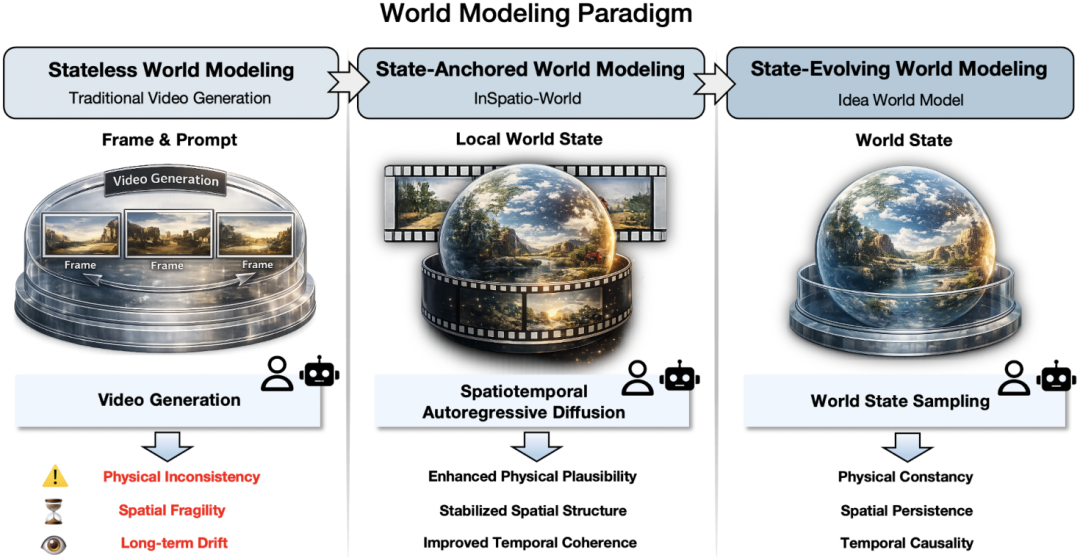
不同于传统模型在像素层面的概率预测,影溯通过显式建模「世界状态」,实现了观测视角与物理实体的本质解耦。
在此范式下,时间的演化不再是画面的连续扩散,而是 3D 状态本身的物理更新。依托「显式状态建模、时空自回归框架、联合分布匹配蒸馏」三大核心技术,模型在锁定空间确定性的同时,将海量视频的视觉真实感完美蒸馏至 3D 空间。
这一范式的演变,标志着 AI 产出从「易逝的像素序列」进化为「可演化的 4D 空间实体」,具体体现为以下两点维度跃迁:
-
从像素模拟到物理仿真:
打破了视频生成的「视觉幻觉」,确保物理法则在持续运行中保持严丝合缝的一致性,而非随时间推移产生逻辑漂移或画面崩塌。
-
从线性播放到时空交互:
彻底告别单向流转的视频形态,世界变得可以被自由暂停、精准回溯,用户甚至能随时重返某一历史时刻,介入一个真实交互的 4D 动态时空。
顶级团队入场,用架构创新,突破算力困局
在世界模型这一充满天价融资与算力博弈的超级赛道上,影溯(InSpatio)团队正以一种极具「DeepSeek 色彩」的方式完成突围。
这种突破的核心不在于算力的暴力堆砌,而在于算法架构的极致创新与工程化能力的深度融合。影溯之所以能用轻量化参数在 WorldScore 榜单上实现「以小博大」,得益于其背后一条独特的产学研协同路径 —— 将顶尖学术团队的原始创新能力,与产业一线的工程实战能力无缝嵌合,形成了完整的技术闭环。
这支「国家队」背景的团队,构建了贯通三维感知理解、实时空间计算与物理仿真的全栈技术和工程能力闭环,而这正是产学研深度融合的成果:浙江大学计算机辅助设计与图形系统全国重点实验室长江学者、国家杰青鲍虎军教授作为首席科学家,所领衔的前沿研究团队在图形学、空间计算与混合现实领域数十年厚积薄发,为世界模型和空间智能的构建奠定了坚实的理论和技术基础;作为鲍虎军教授团队成员、同时也是影溯创始人的章国锋教授,早年即在商汤科技兼职带领技术团队,在学术研究与产业落地之间积累了丰富的实战经验,这种双重身份的淬炼,使他能够将空间智能的前沿算法,转化为驱动产业变革的实际动能。这些来自学术端的理论突破与产业端的落地认知,经由联合创始人刘浩敏博士及其团队的工程化能力进一步放大,在产业一线完成了模型训练、效率优化与系统验证,让前沿算法得以在有限算力下实现实时响应与极致吞吐。
正是这种从实验室到产业端的双向奔赴 —— 学术研究提供「从 0 到 1」的范式突破,工程化能力承接「从 1 到 N」的效率攻坚 —— 让影溯不仅理解如何构建静态空间,更理解如何让空间逻辑化地动态演化。基于这种从「模拟像素」到「模拟存在」的范式理解,影溯在两周内连续凭借 InSpatio-WorldFM 与 InSpatio-World 获得了业内的广泛关注。
从「模拟像素」到「模拟存在」,世界模型正在逼近「真实 」
业界的一个普遍观点是,如果说 LLM 定义了过去几年的 AI 浪潮,那么世界模型很有可能正在定义下一轮。它不只是让 AI 生成得更真实,而在于让 AI 第一次有机会以更接近真实世界的方式去观察、记忆、预测和规划。因此,世界模型正在重写多个行业的底层逻辑……
在自动驾驶领域,世界模型正在推动行业从「端到端感知」迈向「生成式智驾」,通过构建可控的虚拟世界,系统可以在仿真中生成大量长尾场景,反复试错并持续优化,从而形成「数据 — 仿真 — 策略迭代」的闭环。
在虚拟现实(VR/AR)领域,世界模型则有望缓解长期存在的「空间内容供给瓶颈」,将文本、图像甚至视频直接转化为可探索的三维空间,使空间内容的生产从手工建模,走向自动生成与编辑。
而在具身智能领域,世界模型则让机器人第一次具备「行动前的模拟」能力,不再只是被动响应,而是能够在内部推演不同决策路径,以选择更优策略,从「能执行指令」变成「理解环境并自主决策」。
还有视频制作、游戏制作等等,越来越多的领域都将因世界模型的极大进步而同频共振……
影溯的愿景,是构建一个可自主演化、可因果交互的数字世界,推动智能体实现从「交流与绘画」到「预测与规划」的跨越,并最终赋予其主动改造世界的能力。
从「模拟像素」到「模拟存在」,InSpatio-World 便是通往这一目标的坚实基石。这种轻量化设计与极致实时性能的结合,标志着生成式世界建模迈向了全新的里程碑,第一次实现了高精度与沉浸感的深度融合。在不久的将来,无论是工厂里的工业机器人还是家里的游戏、电影、AR 穿戴设备等,或许都将运行在 3D 世界模型之上。
而在这场从 AI「生成内容」走向「构建世界」的全球竞赛中,影溯正成为其中最值得关注的中国变量。
据影溯团队透露,目前已收到全球数十家机器人、自动驾驶与内容巨头的深度商业化需求,正全力加速世界模型的产业落地。影溯诚邀更多行业伙伴共建空间智能生态,共同定义 AI 的未来。
© THE END
转载请联系本公众号获得授权
投稿或寻求报道:liyazhou@jiqizhixin.com