AutoBio:新一代生物实验室机器人仿真与测试平台,助力VLA模型挑战科研自动化,揭示现有模型在精度、推理和流程建模方面的局限性。
原文标题:ICLR 2026|新版「图灵测试」:当VLA走进生物实验室
原文作者:机器之心
冷月清谈:
怜星夜思:
2、AutoBio 仿真系统在多大程度上能够反映真实生物实验室的复杂性?为了进一步提高仿真系统的真实度,未来可以从哪些方面进行改进?
3、AutoBio 的评测结果表明,现有 VLA 模型在哪些方面存在局限性?未来 VLA 模型的发展方向应该如何调整,才能更好地满足生物实验室自动化的需求?
原文内容

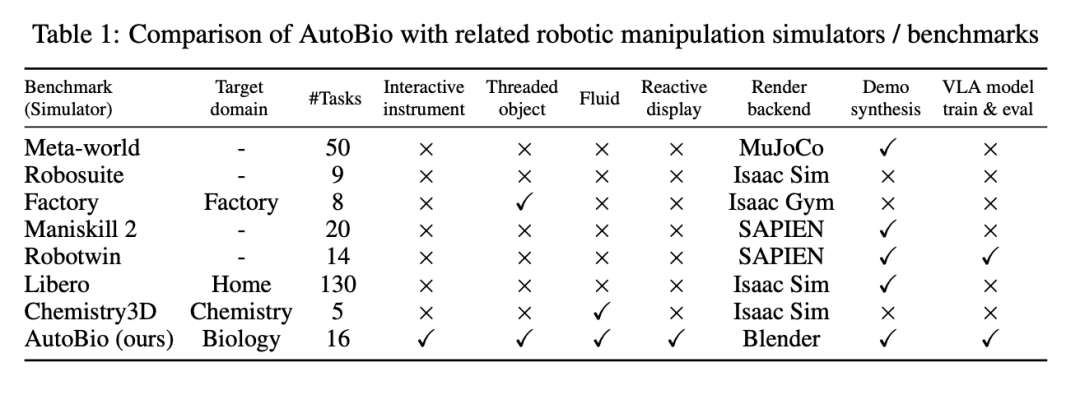
现有 VLA 模型的研究和基准测试多局限于家庭场景(如整理餐桌、折叠衣物),缺乏对专业科学场景(尤其是生物实验室)的适配。生物实验室具有实验流程结构化、操作精度要求高、多模态交互复杂(透明容器、数字界面)等特点,是评估 VLA 模型精准操作、视觉推理和指令遵循能力的理想场景之一。

近期,来自香港大学MMLAB 罗平老师团队和上海交大穆尧老师团队的工作——Autobio 正式被 ICLR 2026 接收,并获得了 8-8-6-6 的同行评议分数。AutoBio 是一个面向数字化生物实验室的机器人仿真系统与基准测试平台。我们通过这篇工作,尝试系统性回答一个关键问题:
当前主流的视觉 - 语言 - 动作(Vision-Language-Action, VLA)模型,是否已经具备在真实生物实验室中执行实验流程的能力?
-
论文标题:AutoBio: A Simulation and Benchmark for Robotic Automation in Digital Biology Laboratory
-
论文链接:https://openreview.net/forum?id=UUE6HEtjhu
-
论文代码:https://github.com/autobio-bench/AutoBio
-
https://huggingface.co/autobio-bench
一.研究背景:为何生物实验室构成关键挑战
与日常操作环境相比,生物实验室在机器人自动化层面呈现出一组高度耦合的挑战:
首先,实验操作通常具有长时序和强约束特征。即便单步动作相对简单,其组合往往构成对顺序一致性和状态依赖高度敏感的完整实验流程。
其次,实验器材大多数为交互式,广泛采用螺纹、卡扣、分档旋钮等精细机械结构,对位姿控制和轨迹规划提出远高于常规操作的要求。
此外,液体样本与透明容器的普遍存在,对视觉感知提出了更大的挑战,而这类场景在现有仿真与评测体系中长期被简化或忽略。
上述因素共同导致:即便在家庭或工业场景中表现良好的模型,也可能在实验室任务中迅速失效。这一现象表明,现有基准并不足以反映模型在科研场景下的真实能力边界。
二.AutoBio 的核心设计思想
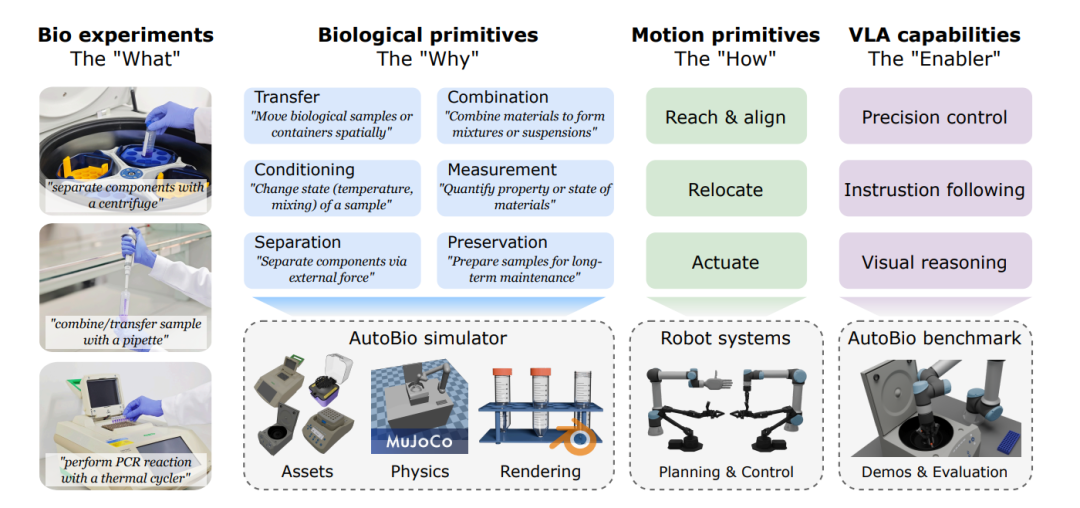
如上图,AutoBio 并非简单复刻实验室环境,而是从实验流程本身出发,提出一种以生物实验语义为中心的建模与评测范式。
我们将复杂实验操作抽象为一组生物实验原语(biological primitives),例如样本转移、混合反应、条件调控、分离与保存等。这些原语进一步映射为可执行的机器人运动与控制模块,并在统一的仿真环境中进行组合。
在系统层面,AutoBio 由三部分构成:
-
面向真实实验室的高保真仿真系统;
-
覆盖多难度等级的标准化实验任务基准;
-
与 VLA 模型直接兼容的数据生成、训练与评测接口。
这一设计使 AutoBio 能够在保持实验语义一致性的前提下,对不同模型进行可复现、可对比的系统评估。
三.一个真正 “像实验室” 的仿真系统
为了让机器人面对的环境尽可能接近真实实验室,AutoBio 在仿真层面进行了多项针对性扩展:
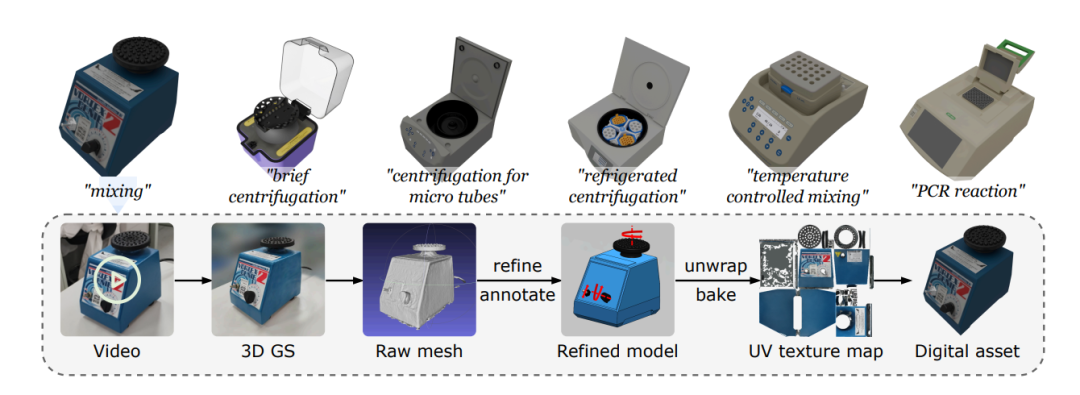
1. 实验仪器的数字化建模
为确保实验操作的真实性,AutoBio 引入了一套从真实仪器到仿真资产的系统化建模流程。通过多视角视频采集与 3D Gaussian Splatting 重建,我们获得高保真的几何与外观表示,并结合 CAD 建模与结构标注,生成可用于物理仿真的数字仪器模型。
该流程兼顾了视觉真实性与物理可交互性,避免了传统手工建模在复杂结构与真实比例上的偏差。
2. 实验室专用物理机制
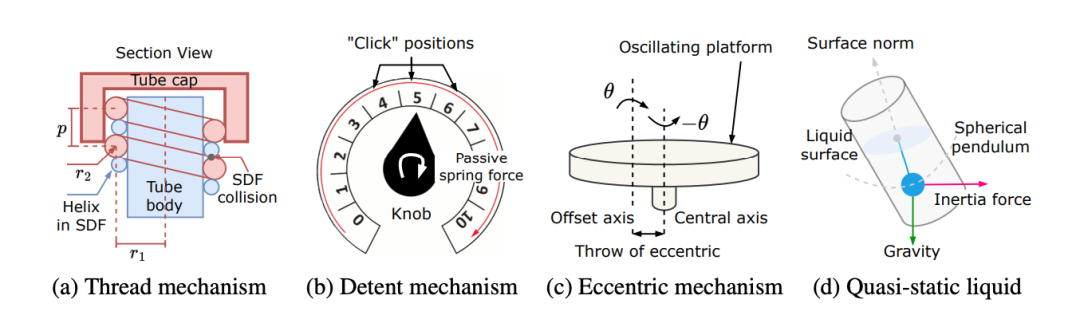
标准物理引擎往往难以直接覆盖实验室中常见的交互模式。为此,AutoBio 针对生物实验高频操作扩展了一系列物理机制,包括但不限于:
-
基于螺纹结构的旋拧与自锁建模;
-
具有离散阻尼特性的分档旋钮;
-
偏心机构驱动的周期性振荡;
-
面向液体样本的准静态液面建模。
这些机制使仿真环境能够更准确地反映实验操作中的关键物理约束,从而避免模型在评测中依赖不现实的 “捷径策略”。
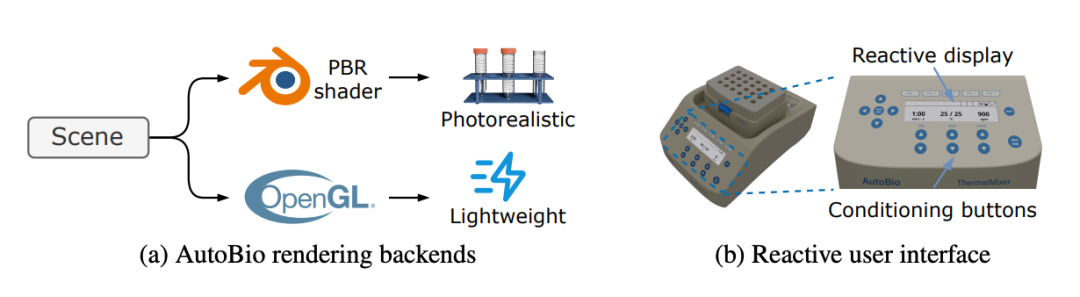
3. 面向视觉模型的渲染与界面支持
考虑到 VLA 模型高度依赖视觉输入,AutoBio 在渲染层面引入了基于物理的渲染(PBR)管线,以提升透明材料、液体以及仪器表面的视觉真实性。
同时,系统支持仪器数字界面的动态渲染,使机器人能够通过视觉信号读取参数、识别状态变化并执行相应操作。这一能力对于涉及人机界面的实验任务尤为关键。
四、AutoBio Benchmark:从实验流程到评测任务
基于上述仿真能力,AutoBio 构建了一个包含 16 个任务的评测基准,覆盖三个难度等级:
-
简单任务:单步或低精度操作,如打开或关闭仪器盖;
-
中等任务:需要一定精度和语言理解能力,如拧开离心管、样本转移;
-
困难任务:涉及多模态推理,如读取屏幕参数并精确调节实验设备。
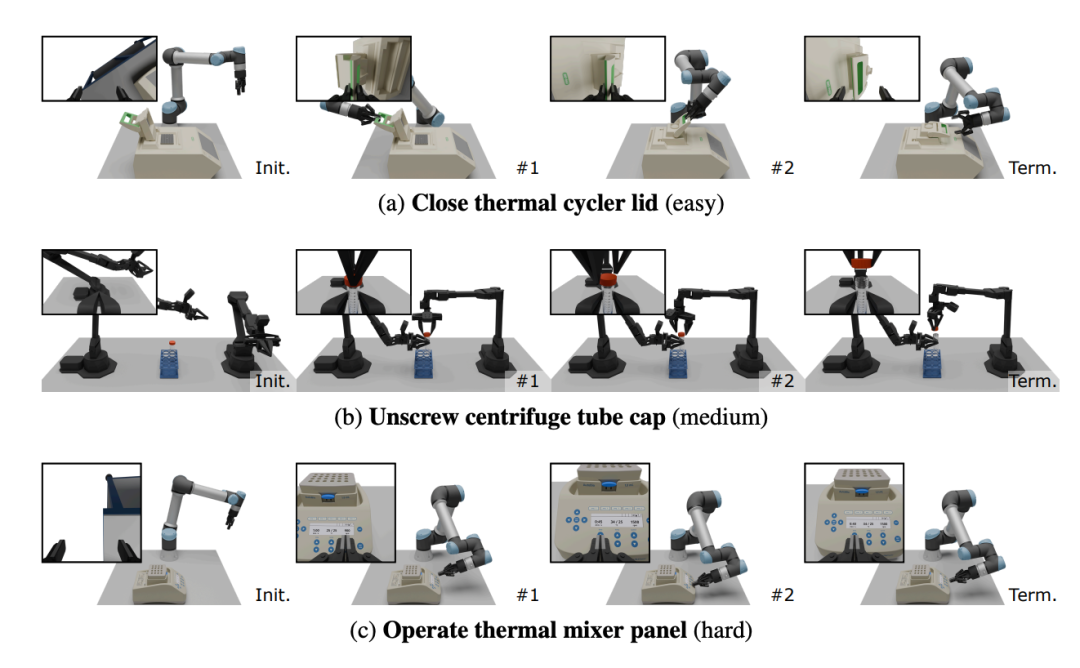
每个任务均支持自动化专家轨迹生成、随机化初始条件以及统一的成功判定机制,使不同模型能够在一致条件下进行公平比较。
五、当前模型的能力边界
我们系统评测了多种主流开源 VLA 模型。实验结果如下图:
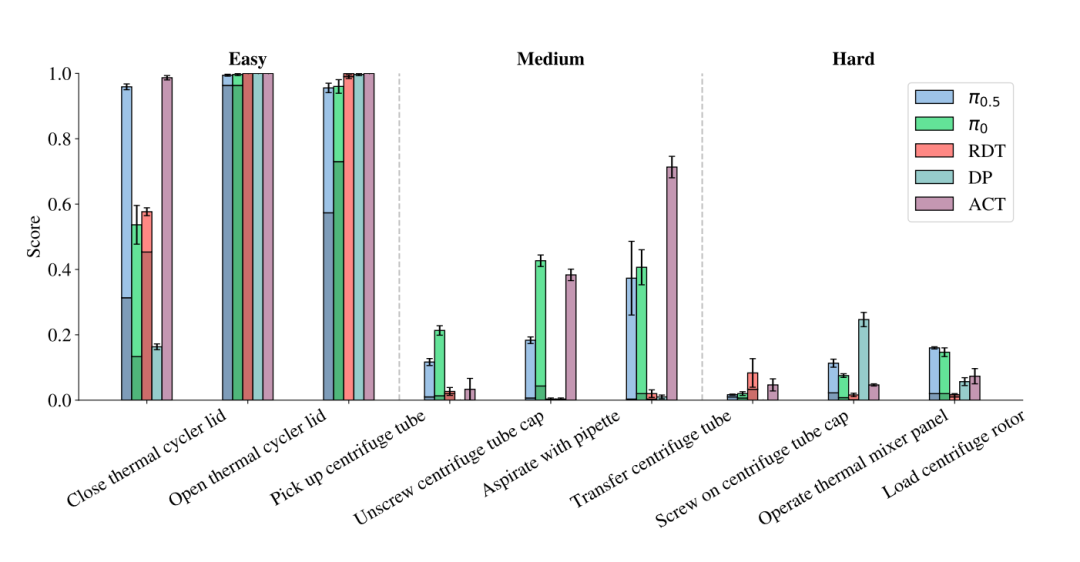
-
在简单任务上,模型已表现出较高成功率;
-
当任务涉及高精度装配、液体判断或屏幕读数时,成功率显著下降;
-
失败往往源于细节误差的持续累积,而非对任务的完全误解。
这一结果揭示出当前模型在高精度操作、细粒度视觉推理以及长期实验流程建模方面仍存在显著不足,也进一步验证了 AutoBio 在刻画真实科研场景挑战方面的必要性。
六、总结
AutoBio 提供了一个面向生物实验室的统一仿真与评测框架,使研究者能够系统性分析机器人在真实科研场景中的能力与局限。
我们的目标并非给出最终解决方案,而是通过清晰的问题定义和可复现的评测体系,为通用机器人走向科研自动化提供一个坚实的起点。
随着模型架构、训练范式与跨模态推理能力的持续发展,我们希望 AutoBio 能够成为连接机器人学习与生命科学自动化的重要基础设施。
© THE END
转载请联系本公众号获得授权
投稿或寻求报道:liyazhou@jiqizhixin.com