银河通用具身智能机器人“小盖”登上春晚,展示了其在零售、医疗和制造领域的实际应用能力,预示着机器人技术实用化时代的到来。
原文标题:沈腾:春晚谁家机器人?除夕夜就扒拉活来了
原文作者:机器之心
冷月清谈:
AstraBrain通过少量人类样本示范、仿真数据合成、自我博弈悟道和真机微调四个步骤,赋予机器人快速学习新技能的能力。银河通用构建的AstraSynth数据金字塔,利用虚拟仿真解决“数据不够”的痛点,用强化学习和小脑模型解决“动作不准”的难题。目前,银河通用已在多个城市开设无人店,并在智慧药店和医院药房投入使用。同时,该公司还与宁德时代、博世等制造业巨头合作,将机器人应用于工厂,进行重体力劳动和适应性任务。
银河通用致力于打造真正“能干活”的机器人,通过实战不断进化,构建“场景+数据+模型”的闭环,以解决传统机器人难以适应非标环境的问题。该公司的目标是让机器人走进千万个工厂,实现具身智能的真正落地。
怜星夜思:
2、银河通用将机器人应用于零售、医疗和制造等多个领域,你认为哪个领域对机器人的需求最迫切?为什么?
3、文章提到“从‘能演示’到‘能干活’,银河通用正在跨越鸿沟”,你认为目前具身智能机器人要真正实现“能干活”,还需要克服哪些关键挑战?
原文内容
2026年春晚,舞台上最忙的,除了演员,就是机器人。
央视春晚贺岁节目《我最难忘的今宵》
这一届上台的机器人各有各的路子——有的走仿生路线,模仿起人来连神态都安排上了;有的直接拼运动能力,一整套动作打下来,现场效果确实很炸。但如果你这一年已经看过太多机器人 demo,其实也不会太惊讶。春晚这个舞台,本来就是要把「最能表演的东西」集中展示出来。
直到沈腾、马丽那个节目里,「铁哥们」小盖(Galbot)出来,气质突然不一样了。
它出场先盘了会儿核桃,那个状态不像来表演的,更像是在胡同口开便利店,理货之余顺手歇两分钟。
更有意思的是,在盘完核桃后,它真就开始干活了,一会儿从货架上取瓶饮料,一会儿打扫玻璃渣。

甚至还串起了烤肠、叠起了衣服。
今年舞台上机器人不少,但大多数时候,你看到的是「把本事秀出来」。只有这一台,是在把事情做完。也正因如此,它带来的观感有点不一样:当技术开始以「能不能真正派上用场」来被衡量时,单纯的视觉奇观就不再是重点了。真正的分量,反而藏在那些看起来并不张扬的干活过程里。
这也是其背后公司「银河通用」和很多同行不一样的地方。在表演式 demo 满天飞的 2025 年,他们在全国开了上百家便利店,直接把机器人放进去当店员。其目的只有一个:让机器人真正学会干活儿。
除此之外,银河通用还在春晚的后台设立了一个独特的太空舱,这是春晚举办44年来首次在后台设立的机器人全自主运营、服务全体演职人员的机器人零售店,这个春晚后台的太空舱被命名为「暖心小屋」。

虽然公司成立才 2 年半,但银河通用已经融资超 8 亿美元,估值超 30 亿美元。「能干活」这个属性是撑起其估值的核心,也正是有这样的底气,这家公司才敢于以「春晚指定具身大模型机器人」的定位,走到全国观众面前。
看完春晚,很多人可能好奇,舞台上看到的这些取物、清理、整理,是怎么实现的?背后并不是简单的动作编排,而是一整套从感知到决策再到执行的技术链条。
能干活儿的「铁哥们」,
其实有一个聪明的「大脑」
我们看到,今年春晚舞台上,银河通用的机器人「小盖」(Galbot)的动作不仅精准,而且很有「人味儿」。

「小盖」是怎么做到的呢?它的秘密武器在于其搭载的通用具身模型:全球首个集成「大脑-小脑-神经控制」于一模的全身全手端到端大模型 AstraBrain「银河星脑」。
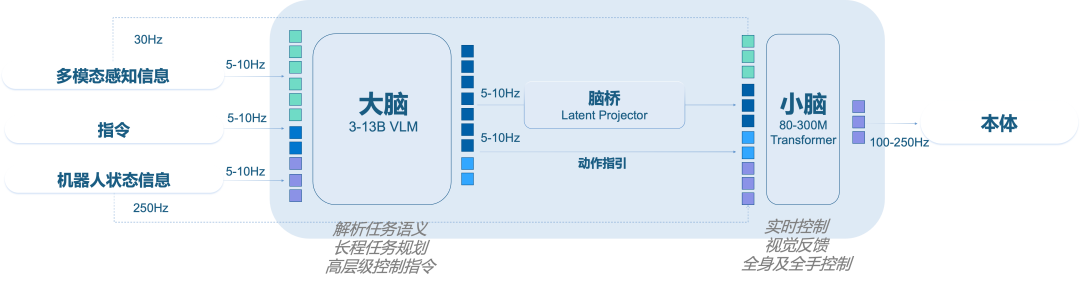
AstraBrain 银河星脑框架
简单来说,AstraBrain 不靠死记硬背,而是让机器人掌握了一套「举一反三」的学习心法。我们就拿小盖机器人应用最广泛的「货架取物」为例,看看它经历了哪几个步骤的修炼:
第一步:师父领进门(人类少量样本示范)
以前教机器人干活,人类工程师得戴着动捕设备或用遥控器手把手教上成千上万遍,堪称「赛博体力活」。AstraBrain 则精明得多,它只需要人类提供极少量的数据示范。机器人就能记住这些动作的关键特征,并等效映射到自己的机械躯干上。
第二步:闭关幻境修炼(仿真数据合成)
在现实物理世界里试错,不仅速度慢,而且成本高(比如打碎东西还得人来打扫)。因此,银河通用把机器人扔进了一个高保真的物理仿真环境(虚拟世界)里。
在这里,系统会自动生成数以万计的刁钻数据:各种杂乱的货架摆法、极端的光照条件,并通过生成式模型合成拟人的抓取动作。机器人在里面疯狂「刷题」,模仿并学习不同情况下的取货精髓。
针对春晚中「捡玻璃碎片」这种视觉感知极限任务(玻璃是透明的,对于机器人来说是一大难题),机器人正是在仿真中见识了海量不同厚度、形状的透明物体,才练就了火眼金睛。
第三步:自我博弈悟道(强化学习闭环)
光靠模仿,依然很难处理复杂的避障。因此,AstraBrain 引入了强化学习机制,能让机器人的末端执行器在虚拟环境里进行高强度的「自我博弈」。规则很残酷也很明确:碰到旁边商品扣分,完美避障加分。
经过数以亿次的高速虚拟自我博弈,机器人自己就能「悟」出一条连人类都难以言传身教的最优移动路径。春晚上那种举重若轻的丝滑感,就是靠挨了无数次(虚拟)打练出来的。
第四步:下凡历劫(真机微调与小脑驱动)
虚拟世界考满分,到了现实世界难免会遇到摩擦力、重力等微小误差。最后一步,就是让机器人在真实的物理世界中进行操作,收集少量真实数据进行「微调」,去彻底抹平「虚拟」与「现实」之间的最后一道鸿沟(Sim-to-Real)。

春晚上惊艳全场的「盘核桃」绝活儿,正是这一步的集大成者。在这里,AstraBrain 的「神经动力学小脑模型」发挥了关键作用:系统先让机器人在虚拟世界里疯狂练习,练出一套「基础盘法」;随后在真实世界中积累大量的交互数据,学习真实的动力学响应,生成一个「残差策略网络」。
简单来说,就是在虚拟世界练招式,在真实世界找「物理手感」,两者结合,系统在后台悄悄微调动作指令,机器手就能在现实里把核桃盘得十分溜了。
以上从虚拟到现实的这套打法,被银河通用总结为 AstraSynth 数据金字塔:以人类数据为基石构建通用认知,依靠中间层海量的仿真合成数据跨越虚实鸿沟,最终在塔尖通过真机数据完成极致的实战打磨。
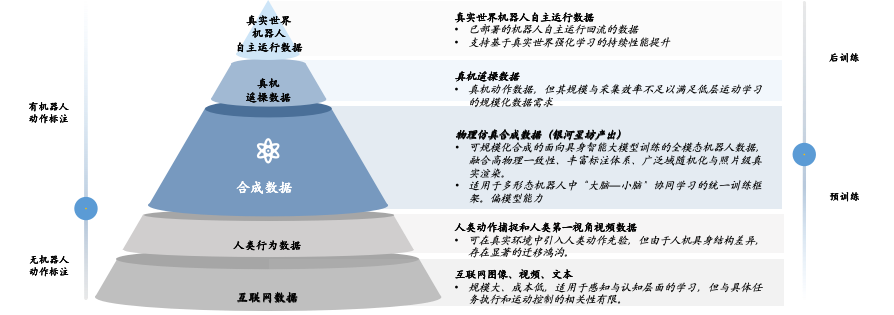
用虚拟仿真解决「数据不够」的痛点,用强化学习和小脑模型解决「动作不准」的难题,这就是 AstraBrain 的通关秘籍。
这让机器人不再是只能执行单一程序的精密仪器,而是真正掌握了快速学习新技能的能力:
-
大脑挑战感知极限:面对视觉上近乎隐形的透明玻璃碎片,它能结合多模态感知与力觉反馈,精准识别边缘并稳稳捏起,既不捏碎也不滑落。
-
小脑赋予指尖手感:通过神经动力学小脑模型,它能自如应对不规则受力,不仅将两枚核桃盘得十分溜,甚至能完成持续 3 分钟的高难度转笔,展现出极致的指尖动态平衡。
-
应对柔性物体变形:面对形态随机变化的衣物,它不再依赖预设轨迹,而是实时判断褶皱状态并预测变形,完成抓、拉、折、压等一系列复杂的柔性操作。
-
双手协同与工具泛化:在串烤肠等任务中,它深刻理解了「工具是手臂的延伸」。无论是操控烤钳还是配合签子,双臂均能实时协同,实现对新工具的快速上手与泛化使用。这种对工具操作的泛化能力,意味着它不仅会烤肠,未来拿到扳手、螺丝刀等工业工具时,也能像人类一样快速上手。
今天能盘核桃、叠衣服,明天它就能走进工厂、药店、社区为你干活服务。
走下春晚舞台,奔赴真正的「主战场」
对于成立仅两年半的银河通用来说,此次 Galbot 站上春晚舞台无疑是一个「高光时刻」。但正如我们前面所说,它并不是一个表演型机器人,所以舞台并不是它的主场,零售店、工厂、医院等需要机器人干活的地方才是。
仔细回想一下,你在公司楼下没准儿就见到过 Galbot,因为银河通用已经在北京、成都、杭州这些城市的商圈和公园里铺了 100 多家「银河太空舱」无人店。不管你是半夜去买感冒药,还是大中午想喝杯冰咖啡,机器人都能自己完成识别、抓取和打包。
这套系统已经稳定运行了一年多,甚至在爱博医疗的智慧药店里,一台机器人就能管数万盒药,真正做到了 7x24 小时不间断服务,减轻夜间工作人员负担。在宣武医院和华西第二医院,它还被用来在药房分拣药品。

在 2026 年春晚零点报时前,《山海寻梦》这首歌曲与 S1 画面植入的同时,银河通用也在默默书写着它的科技传奇。作为唯一一家与卫星、航母、C919 一同入选中国科技国之重器的中国机器人公司,银河通用的成就背后,真正的「狠活」其实发生在那些普通人看不见的工厂里。
银河通用已经拿下了宁德时代、博世、丰田、北汽这些制造业巨头的几千台订单,与百达精工签订的上千台订单更是创下了具身智能领域商业化订单的新纪录。在这些地方,机器人正在尝试完成一些重体力劳动,比如搬运那种死沉的电池模组或者汽车零部件,同时学会了自己去换电池、主动避让、重新规划,展现出了极强的适应性。
从「能演示」到「能干活」,
银河通用正在跨越鸿沟
看到这里你可能会问:不就是搬个东西、取个药吗?为什么到现在才有一个「能干活」的机器人上春晚?其实在机器人圈子里,「能演示」和「能干活」中间,隔着十万八千里。
首先,那些固定的、重复的、不需要动脑子的活儿,早就被传统机械臂抢光了。现在剩下的,全是最难啃的硬骨头,也就是那些充满了变数的活儿。比如在便利店,今天饮料瓶是立着的,明天可能是倒着的;在工厂里,零件可能摆歪了,或者突然有个人走过来了。传统机器人遇到变数只会报错停机,而银河通用的核心目标,就是让机器人长出「脑子」和「眼睛」,去适应这些乱七八糟的非标环境,搞定自动化产线上的「最后一公里」。
但只是这样还不够。众所周知,工业现场容错率极低,停机一分钟可能就是巨额损失,所以工厂不需要娇滴滴的高科技玩具,而是像老黄牛一样稳定的「耐造」机器。换句话说,能进工厂打工的机器人,都得是「狠人」。
银河通用从成立的第一天起,目标就是造出这种「狠人」。这次在春晚上干活的机器人,背后凝结的是他们在过去两年半为了这个目标搭建起来的技术体系。
而已经进厂打螺丝的那些机器人,现阶段也不是纯粹为了「打工」,而是边实战、边进化,构建起一个「场景+数据+模型」的闭环。机器人在真实环境里干得越多,收集的「实战数据」就越多,反过来让模型越聪明,适应能力越强。
在这个拼「数据」和「脑子」的时代,谁能最先跑通这个循环,谁就是赢家。目前来看,银河通用是为数不多有望跑通的具身智能企业之一。而「能干活」这三个字的分量,要等到它们真的把机器人铺进千万个工厂那天,才算真正称出来。
© THE END
转载请联系本公众号获得授权
投稿或寻求报道:liyazhou@jiqizhixin.com