IEEE首篇图智能体(GLA)综述发布!图结构突破LLM Agent瓶颈。
原文标题:IEEE | LLM Agent的能力边界在哪?首篇「图智能体 (GLA)」综述为复杂系统构建统一蓝图
原文作者:机器之心
冷月清谈:
文章核心框架强调“万物皆可图”,认为图结构能有效弥补LLM Agent处理结构化信息的不足。无论是单个智能体内部工作流(如工具图、知识图),还是多智能体间的协作关系(如智能体交互图),均可抽象为图。
对于单个智能体,图结构能从规划、记忆和工具三个方面进行强化。规划方面,图可建模计划、子任务、推理过程及环境,使思考过程“有迹可循”。记忆方面,通过“交互图”记录经验,借助“知识图”存储外部结构化知识,有效应对记忆瓶颈。工具管理方面,“工具图”清晰描述工具依赖,优化工具选择与组合。
对于多智能体系统,图结构在协同、效率和可信赖性上发挥关键作用。协同范式从“静态”演化至“动态”,通过任务动态协同和过程动态协同实现更强的适应性。效率优化方面,图论方法通过剪枝通信、裁减智能体、避免无效沟通轮次,有效为系统“瘦身”。可信赖性方面,将系统建模为图有助于分析偏见、有害信息传播,并利用图神经网络检测恶意节点,提升系统安全性。
该综述系统性确立了图在LLM Agent研究中的核心地位,为GLA提供了统一分析框架,并展望了未来发展方向,包括动态与持续图学习、全栈智能体统一图抽象、多模态图、可信赖多智能体系统及大规模多智能体模拟。这为LLM Agent领域突破当前瓶颈、构建更复杂智能体系统提供了清晰的统一蓝图。
怜星夜思:
2、文章提到GLA能让智能体更可靠、更自主,甚至能管理多智能体协调。如果未来这些图智能体变得超级强大,能够在复杂系统里独立工作,那我们人类作为管理者或使用者,应该扮演一个什么角色?是完全信任它们完成任务,还是需要实时监督,或者说人机协作的模式会是怎样的?
3、GLA用图来增强智能体对特定任务和环境的理解,这听起来很专业。但如果一个GLA需要在非常多变甚至全新的环境下工作,它的图结构能快速适应并有效泛化吗?还是说每次遇到新环境,都需要大量的图构建和训练?这会不会限制它的通用性?
原文内容

作者为 Griffith Unversity 的刘奕鑫,李世源,潘世瑞,National University of Singapore 的张桂彬,和 Nanyang Technological University 的王琨。
LLM Agent 正以前所未有的速度发展,从网页浏览、软件开发到具身控制,其强大的自主能力令人瞩目。然而,繁荣的背后也带来了研究的「碎片化」和能力的「天花板」:多数 Agent 在可靠规划、长期记忆、海量工具管理和多智能体协调等方面仍显稚嫩,整个领域仿佛一片广袤却缺乏地图的丛林。
我们应如何在一个统一的框架下,突破当前瓶颈,理解并设计这些复杂的智能体系统?
近期,一篇发表在 IEEE Intelligent Systems 全面的综述首次给出了答案。该文创新性地提出,「图」可以作为一种通用语言和强大结构,来系统性地分析和增强 LLM Agent 的各个方面,并正式定义了「图智能体(Graph-augmented LLM Agent, GLA)」这一新兴研究方向。相比纯 LLM 方案,GLA 在可靠性、效率、可解释性和灵活性上均展现出巨大优势。
-
论文标题:Graph-Augmented Large Language Model Agents: Current Progress and Future Prospects
-
录用期刊:IEEE Intelligent Systems
-
作者:Yixin Liu, Guibin Zhang, Kun Wang, Shiyuan Li, Shirui Pan
-
论文地址: https://arxiv.org/abs/2507.21407
-
代码地址: https://github.com/Shiy-Li/Awesome-Graph-augmented-LLM-Agent
核心框架:
万物皆可图,为智能体赋予结构
LLM Agent 的核心挑战在于如何处理结构化的信息和流程。而「图」作为一种天然的结构化数据表示,恰好能弥补其不足。
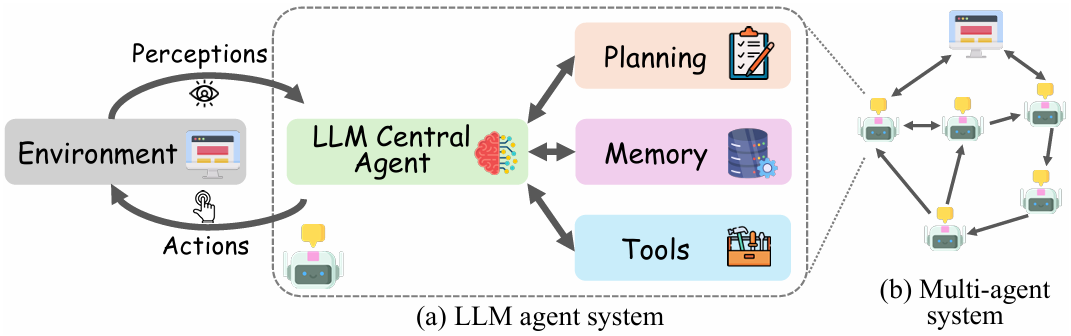
图注:(a) LLM Agent 系统核心组件 (b) 多智能体系统
无论是单个 Agent 内部的工作流,还是多个 Agent 之间的协作关系,都可以被抽象为不同类型的图,如工具图、知识图、智能体交互图等。
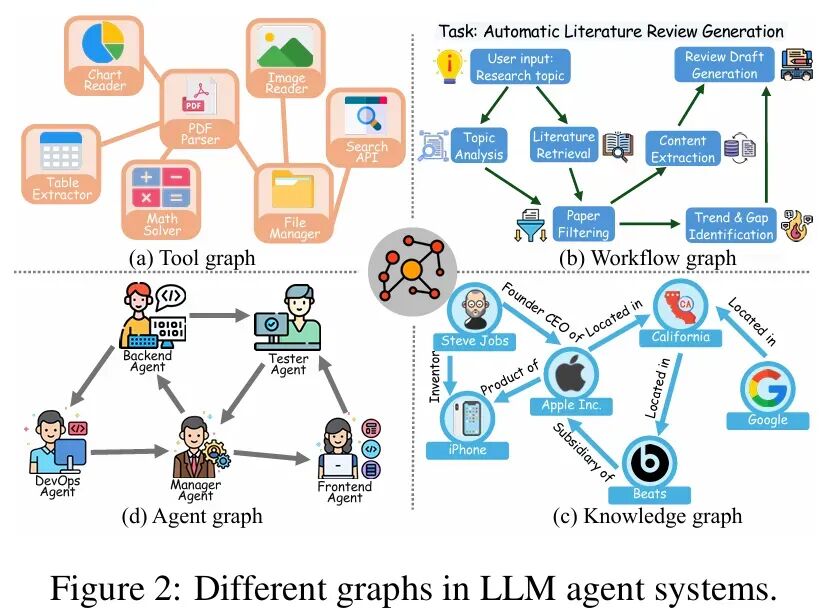
图注:LLM Agent 系统中存在的不同类型的图
剖析单个智能体:
规划、记忆与工具的图结构
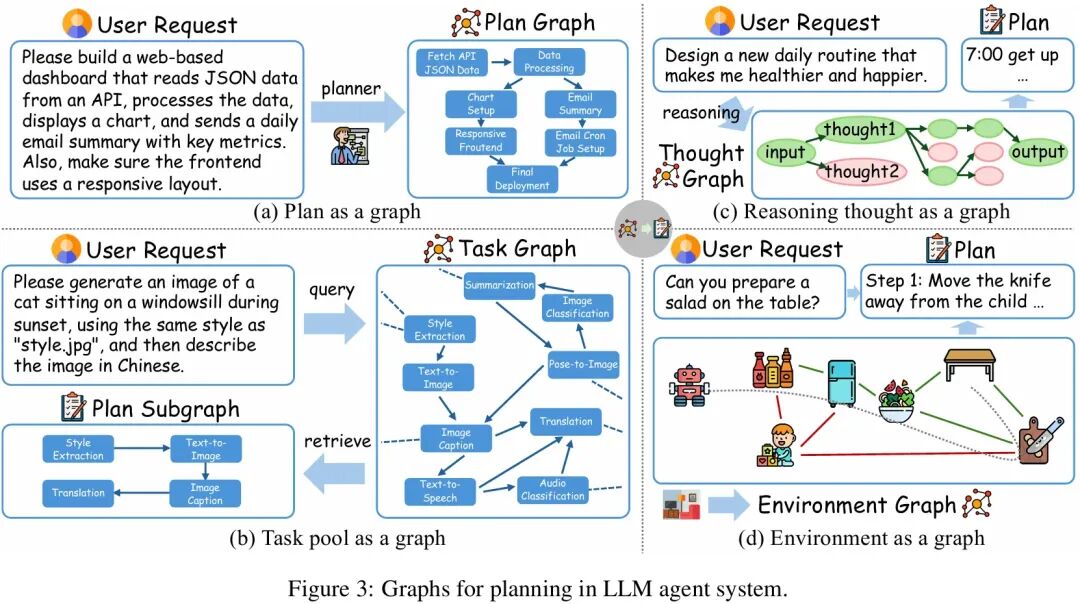
规划(Planning):让思考过程「有迹可循」
论文指出,图结构可以从四个层面强化智能体的规划能力:1)将计划本身建模为图,明确子任务依赖;2)将可选的子任务池建模为图,确保规划的可执行性;3)将推理过程建模为图(如思维图),实现更灵活的思考;4)将环境建模为图,为规划提供关键上下文。
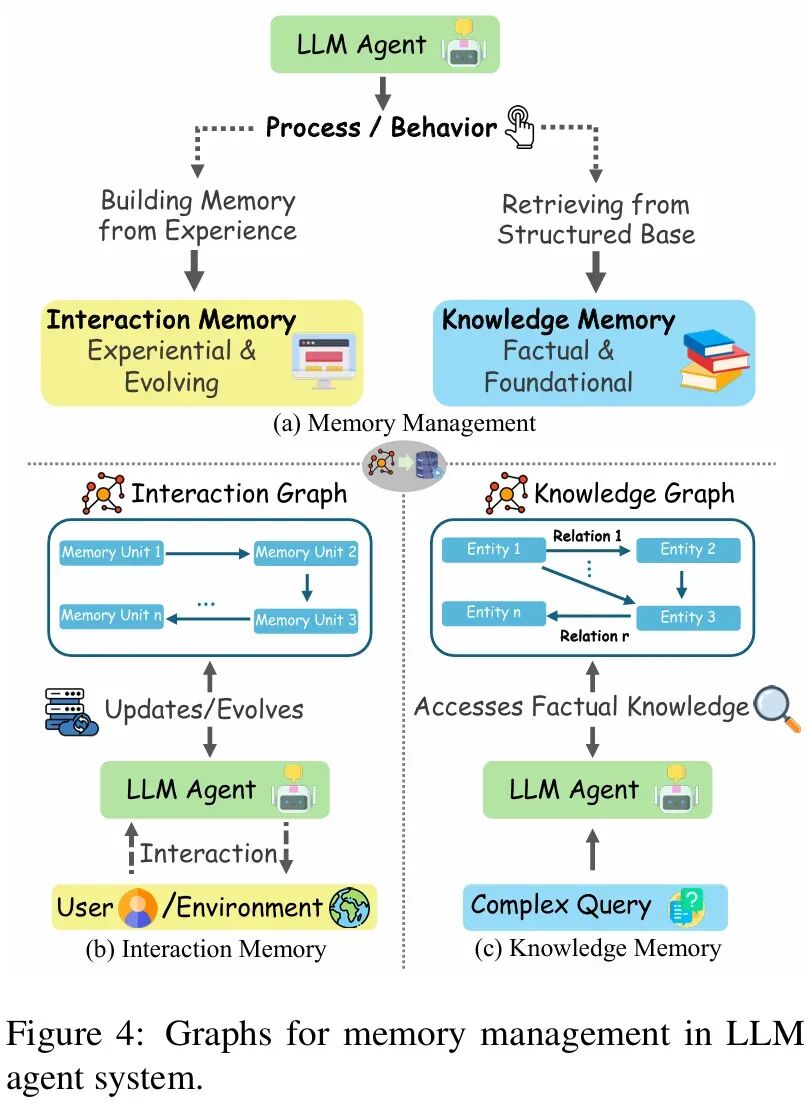
记忆(Memory):构建可演化的长期知识库
为解决 LLM 的记忆瓶颈,图结构提供了两种有效途径:通过「交互图」来记录和组织智能体与环境的互动历史,形成经验;通过「知识图」来存储和检索外部的结构化事实知识。
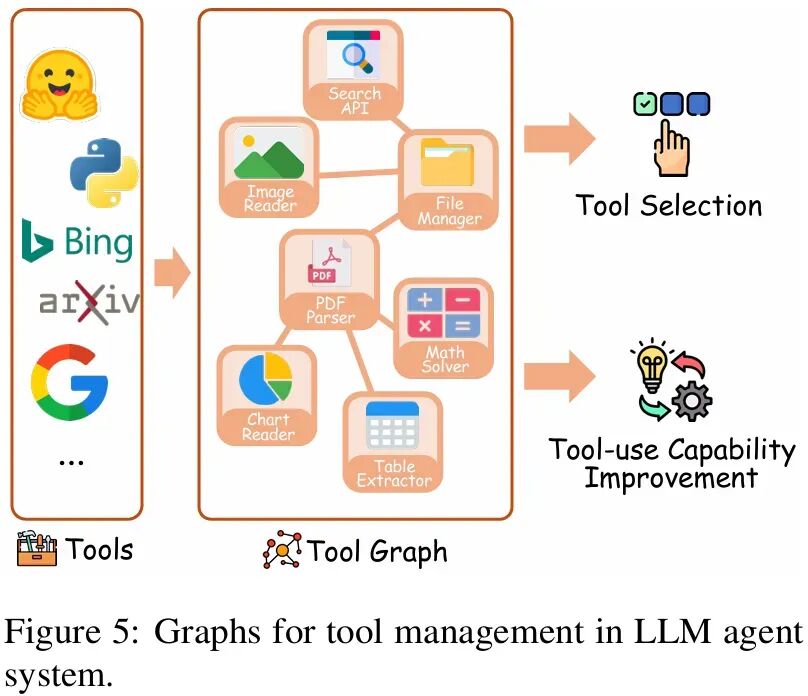
工具(Tools):管理和优化工具使用能力
面对海量 API,「工具图」不仅能清晰描述工具间的依赖关系以辅助工具选择,还能通过对图结构的分析,帮助智能体提升自身调用和组合工具的能力。
解析多智能体系统:
协同、效率与可信赖
协同范式(Orchestration):从「静态」走向「动态」
本综述的一大核心贡献,是将多智能体协同划分为三大范式,清晰地展示了其从「固定」到「适应」再到「演化」的技术演进路线:
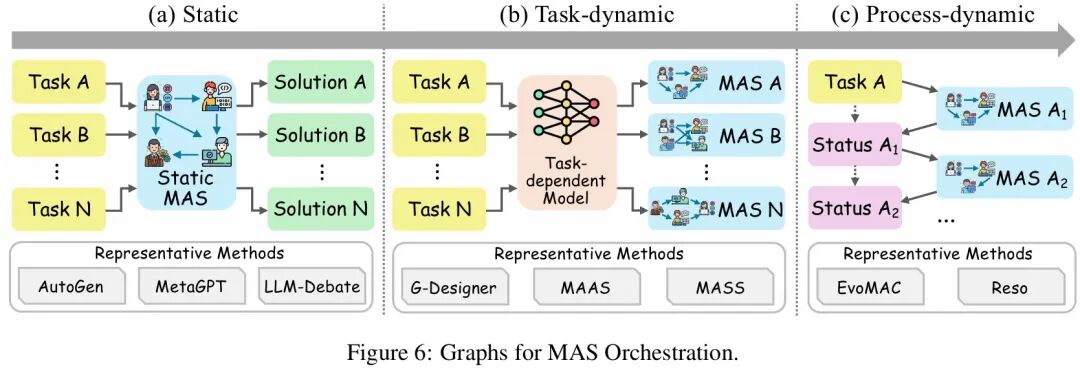
(a)静态协同: Agent 间的协作关系固定不变,代表工作如 AutoGen、MetaGPT。
(b)任务动态协同: 系统能为不同任务生成特定的协作图,灵活性更强,代表工作如 G-Designer。
(c)过程动态协同: 在任务执行中,协作图能根据实时状态不断演化,适应性最强,代表工作如 EvoMAC。
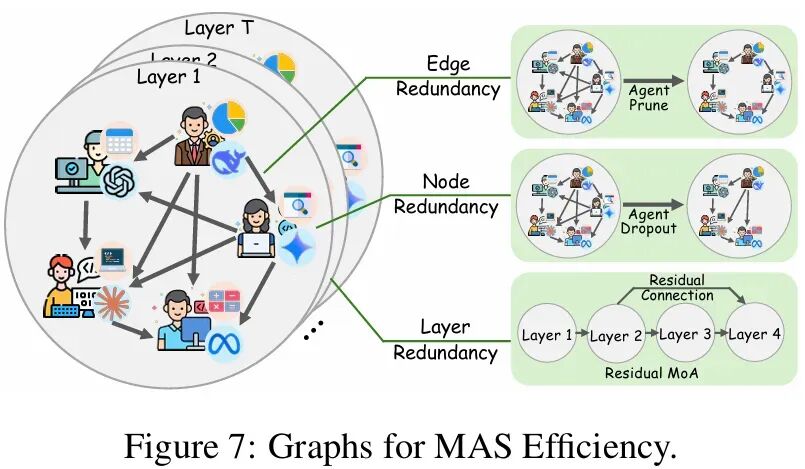
效率优化(Efficiency):为「臃肿」的团队瘦身
多智能体系统往往面临高昂的成本。论文总结了图论方法如何从三个层面为系统「瘦身」:边冗余(剪枝通信)、点冗余(裁减智能体)和层冗余(避免无效沟通轮次)。
可信赖(Trustworthness):保障系统的安全可靠
本文还探讨了图在构建可信赖 MAS 中的作用。通过将系统建模为图,可以系统性地分析偏见、有害信息等在网络中的传播方式,并利用 GNN 等技术来检测和预测恶意节点,从而提升整个系统的安全性。
总结与未来展望
这篇综述首次系统性地确立了「图」在 LLM Agent 研究中的核心地位,为「图智能体(GLA)」这一新兴方向提供了统一而强大的分析框架。
论文为 GLA 的未来发展指明了五个关键方向:
-
智能体系统的动态与持续图学习:让图结构能随环境和任务持续演化。
-
全栈智能体系统的统一图抽象:构建能贯穿规划、记忆、工具等所有模块的统一图模型。
-
用于多模态智能体的多模态图:融合语言、视觉、音频等多模态信息。
-
可信赖多智能体系统:深入研究图在隐私、安全、公平性方面的应用。
-
大规模多智能体模拟:利用图学习算法支持亿万级别智能体的模拟。
© THE END
转载请联系本公众号获得授权
投稿或寻求报道:liyazhou@jiqizhixin.com