同济大学任捷团队借鉴物竞天择,用俄罗斯方块模块化设计,通过真实世界反馈,30轮迭代使微型机器人速度提升至25.27mm/s,为离散拓扑优化开辟新路。
原文标题:把“俄罗斯方块”搬进设计室:物竞天择让振动微型机器人进化得越跑越快
原文作者:数据派THU
冷月清谈:
团队放弃传统的像素级设计,而是创造性地采用“俄罗斯方块”作为微型机器人形态编码的基本模块。这种离散几何表示方式极大地增加了“可直接制造的候选”形态数量,为后续的优化提供了丰富的“个体池”。结合连通性、边界限制、静稳性等约束,确保了拼接出的形态都是可实际制造的。
关键创新点在于,研究引入了“硬件在环”的闭环优化系统。机器人形态不仅在数字世界中被设计,更重要的是在现实世界中经历“制造—测试—再学习”的迭代过程。每次迭代中,3D打印的样件都会在振动测试台上进行真实的速度测量,并将真实位移数据反馈给AI算法进行学习和调整,确保学习到的是现实中的最佳形态而非理想仿真。
通过这种闭环系统,在短短30轮的迭代中,机器人形态从随机混沌中演化出一种全新的物种。具体来说,最高速度从低于20mm/s提升至惊人的25.27mm/s,远超纯随机搜索的最高速度。而且,最终筛选出的高速体型呈现出稳定的三段式结构:前缘连续材料带作为支撑(“前肢”),中段形成刚性“躯干”有效传导能量,尾部适度挖空形成“减阻尾”并利用杠杆效应抬起产生净前进。
此外,该“表示—约束—闭环”方法具有普适性,已成功迁移到多个纯组合基准任务中,显示出其在离散拓扑优化领域的广泛应用潜力,有望拓展到柔性执行器、机械超材料等领域。这项研究不仅推动了微型机器人技术的发展,也为材料与制造领域的复杂形态设计提供了新的思路。
怜星夜思:
2、文章提到了用“俄罗斯方块”这种模块化的方式来设计机器人,而不是用更细的像素点。大家觉得这种“搭积木”的设计思路在未来的工程设计里会越来越流行吗?除了“俄罗斯方块”,你们还能想到哪些有趣的模块化组件,能用来设计出更复杂的系统?
3、这篇研究特别强调了“真打真测”,把真实世界的反馈引入到设计优化中。现在很多设计都依靠强大的模拟仿真,大家觉得在什么情况下,像这样投入大量资源进行物理测试是不可替代的?或者说,模拟技术发展到什么程度才能真正替代大部分的物理测试呢?
原文内容

本文约2000字,建议阅读5分钟本文介绍了同济任捷团队用方块编码 + 闭环优化,30 轮演化出 25.27mm/s 高速微型机器人。
“玛娜生态,末日废土,跑得最快的噬极兽。”
在《灵笼》的世界里,谁更适应环境,谁就活下来——“跑得最快”的物种在废土中率先突围。现在,科学家把这条自然法则搬进现实的设计室:把俄罗斯方块当作可拼接的“器官”去编码微型机器人的形态,在统一外场里让形态经历真的制造与真的筛选,一次次被“选择”,一次次再生长。
导语:从随机“肉球”到会跑的“新物种”
同济大学物理科学与工程学院/上海自主智能无人系统科学中心任捷教授团队,扮演“女娲”的角色:采用俄罗斯方块作为微型机器人形态编码的基本模块,结合“数字世界设计”与“现实世界反馈”的 AI 算法,进行闭环优化的“功能-形态”进化(如图 1,视频 1)。
物竞天择,优胜劣汰。该闭环系统,从一片随机混沌编码的“弗兰肯斯坦”的肉球中,在 30 轮内演化出了一种新物种形态,最高速度提升到 25.27 mm/s,得到“跑得最快”的“微型机器人”的形态设计。
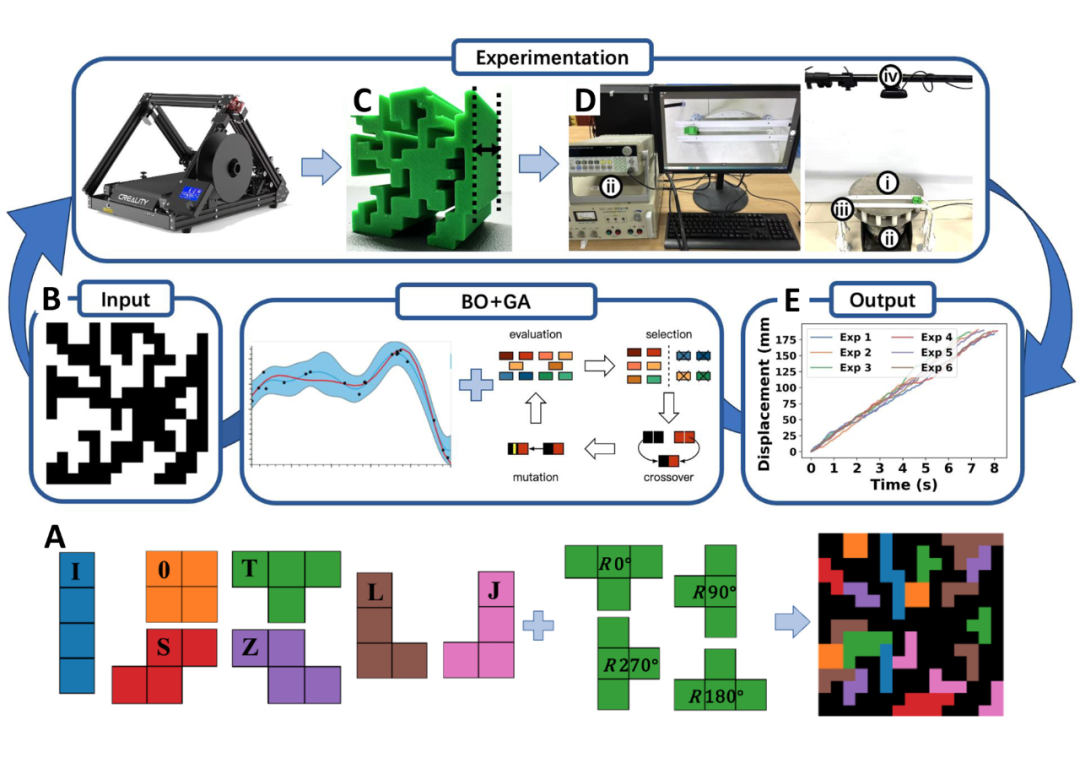
▲ 图1:“设计—制造—测试—再学习”的闭环流程。从“方块拼形状”的生成(A),到最终形态(B)与 3D 打印样件(C)、振动测试平台(D),再到位移—时间曲线(E)的闭环总览。
1、为什么要用“方块器官”而不是像素点?
离散几何世界里,像素级(0/1)设计可制造解极稀疏,随机抽样几乎碰不到“能做、能跑”的形态。
任捷团队把像素换成“俄罗斯方块”(I/J/L/O/S/T/Z),在 15×15 网格中以“形状—旋转—位置”四元组拼成整机,连通、边界、静稳等约束在生成时就内嵌,做到“拼出来就能做”。
统计对比显示,方块表示把“可直接制造的候选”从几乎不可遇,提升到一次采样就能拿到大量可用设计的量级,为后续闭环提供了“能下场的个体池”。
2、不止在电脑里跑:每一轮都“真打真测”
团队把 3D 打印与振动测试台接成一条“传送带”:算法提出候选形状 → 打印 → 上台 → 高速度相机测位移 → 把真实速度喂回模型(如图 1D–E)。
函数发生器 → 功放 → 电动激振器 → 钢盘 → 样件的单向信号链,能量与“控制”全部在外场,几何形态是主变量;导轨只约束自由度、并不承重,确保“跑得快还是慢”来自形状差异。
这样的硬件在环闭环,使得学习到的是现实里的最佳形态,而不是理想仿真里的纸面解。
3、闭环如何推进:探索 → 过渡 → 精修
算法以随机森林为替代模型,配合随机蒙特卡洛采集在“有潜力且不确定”的区域多探几下,再用遗传算法在可行空间里做微变异与多样性约束,既不早早收敛,也不盲目乱撞。
速度曲线显示,第二轮就越过了 20mm/s 的门槛,第 26 轮出现 25.27mm/s 的峰值,此后在高性能邻域内打磨,整体分布持续右移(如图 2)。这条轨迹,正是从“什么都不知道”到“有章可循”的生长轨迹。
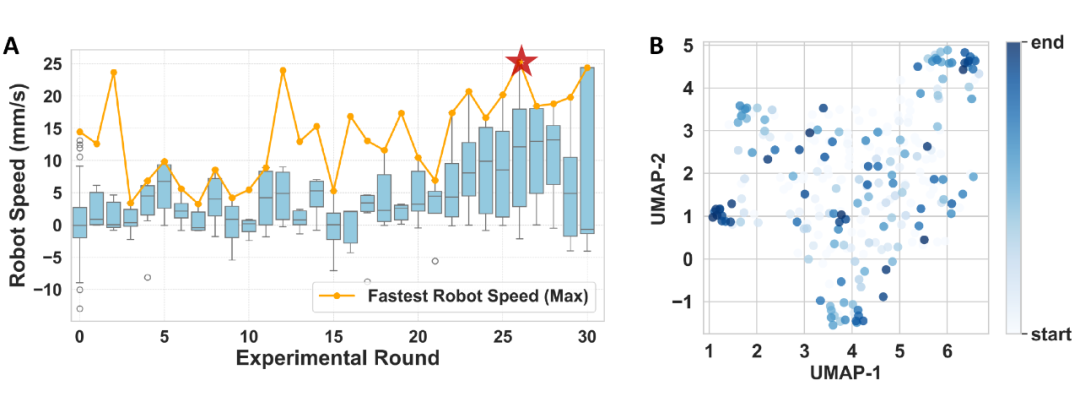
▲ 图2:探索→过渡→开采三阶段,30 轮内的速度分布与参数空间收缩;红星为第 26 轮的 25.27mm/s 峰值。
4、“嗜极兽”的体型密码
有趣的是,被自然选择出的“会跑的新物种”,其体型并非杂乱无章,而是稳定呈现三段式:
-
前缘保留一条连续材料带,像“前肢”一样稳定支撑;
-
中段形成刚性“躯干”通道,把竖向激振的能量有效前传;
-
尾部则适度挖空变成“减阻尾”。
高速相机拍到的杠杆效应显示:受激时尾端可抬起约 2.1 mm,接触点前移,产生净前进(如图 3C)。低性能体型则常常“空洞无序”,能量被耗散。这套“前肢—躯干—尾巴”的器官化布局,正是闭环选择出来的高适应度结构。
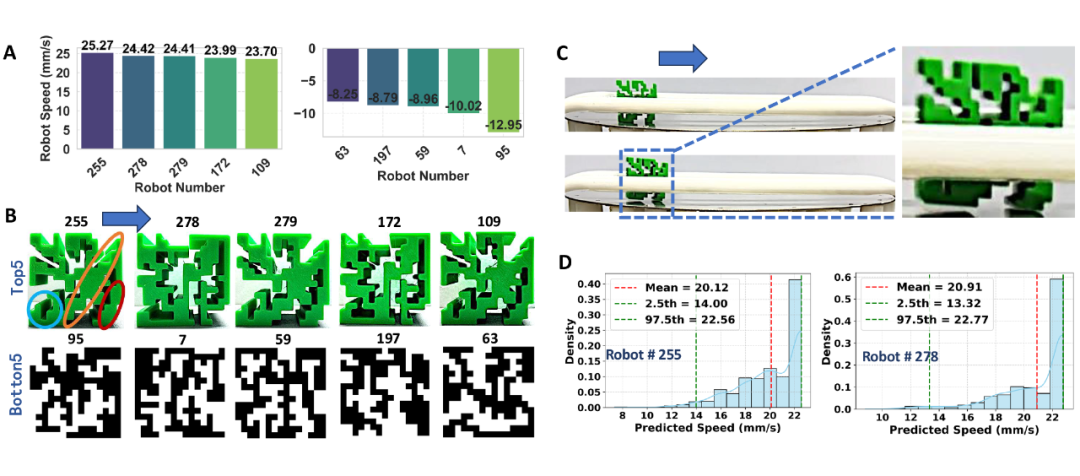
▲ 图3:高/低性能体型对比与尾部 2.1mm 抬升的高速成像
5、真的更强:与“纯随机”正面对照
在同等评估预算下,离线随机搜索几乎一直被卡在 20mm/s 以下;闭环第二轮就跨过去了,并在后续不断刷新峰值(见图 4)。最终,两者的速度天花板分别停在 13.39mm/s(随机)与 25.27mm/s(闭环)。
换句话说,即便在“全离散、强约束”的高维空间里,现实反馈 + 聪明取样也能显著缩短找到好形态的路径。
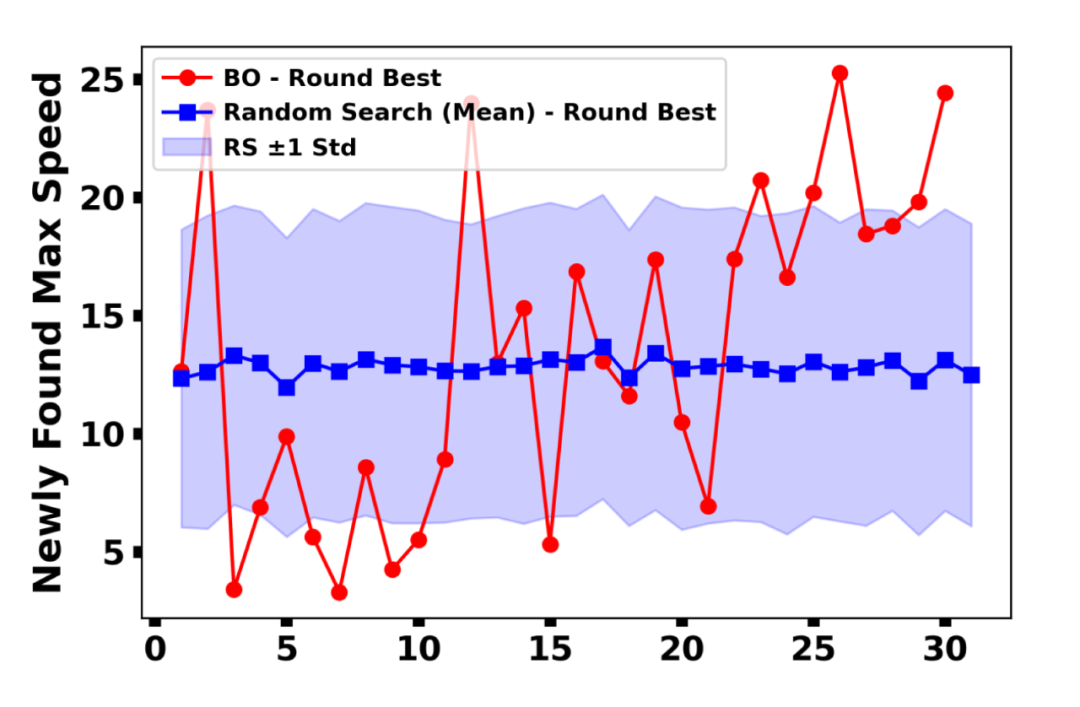
▲ 图4:闭环优化 vs. 离线随机的最高速度对比曲线。
6、不止一台“会跑的小怪兽”
这套“表示—约束—闭环”方法与硬件解耦。我们把同样的流程迁移到 Trap‑64、0–1 Knapsack‑250、Max‑Cut‑128 三个纯组合基准上,在固定预算下持续优于随机基线,显示出对离散拓扑任务的普适性,可拓展到柔性执行器、机械超材料等。
相关代码与数据已在 Zenodo(DOI:10.5281/zenodo.14978583)开放,便于复现与二次开发。
7、一句话带走
把像素换成部件、把约束前置到生成、把学习拉回现实闭环,形态就会在统一外场里被自然选择出来:能做、好用、跑得快。这既是一个振动微型机器人的故事,也是离散拓扑优化在材料与制造中的一条通路。
本文来自同济大学任捷研究团队原创研究工作,相关代码与数据已在 Zenodo 开放获取。研究得到国家重点研发计划和上海市自然科学基金等项目支持。
近年来,任捷教授团队在人工智能×物理学的学科交叉方面取得了一系列进展,包括基于流形扩散的无监督学习对拓扑物态的分类、多目标优化的二维功能材料与器件设计、辐射制冷人工微结构设计、神经网络自编码逆向设计拓扑光学传感结构、基于伪逆学习的光电混合的神经网络、人工智能新范式设计多孔介质、药物设计、超低热导材料等,并受邀为中国物理学会的《物理学报》撰写“物理启发的人工智能”相关综述,相关成果形成了一套具有自主知识产权的计算机软件著作权 Darwin Machine for Multi-Functional Meta-Crystal Design Platform。
论文题目:
Closed‑Loop Optimization of Tetris‑Inspired Robotic Morphology Evolution
作者单位:
同济大学上海自主智能无人系统科学中心;同济大学物理科学与工程学院。本文为任捷课题组/任捷团队原创研究工作。
论文地址:
https://www.sciencedirect.com/science/article/pii/S0264127525009530
期刊与 DOI:
Materials & Design, 257 (2025) 114533,
DOI 10.1016/j.matdes.2025.114533
