首个数据驱动多视角3D点跟踪器,实现复杂场景精准追踪,克服遮挡与深度歧义。
原文标题:【ICCV2025】多视角三维点跟踪
原文作者:数据派THU
冷月清谈:
这款数据驱动的多视角三维点跟踪器是首个此类系统,旨在解决传统单目跟踪器在深度歧义和遮挡下的局限性,以及现有复杂多摄像头系统对大量相机和繁琐优化的需求。它通过整合多个相机视角(如四个)的特征到统一的点云中,并结合k近邻相关性与基于变换器的更新机制,即便在遮挡情况下也能实现鲁棒且精准的在线三维对应点估算。该跟踪器在5000个合成序列上训练,并在真实世界基准上表现出色,中位轨迹误差分别达到3.1厘米和2.0厘米,展现了卓越的精度。研究团队还发布了该跟踪器及数据集,为多视角三维跟踪领域树立了新标准,并提供了实用的工具。
怜星夜思:
1、文章提到这个多视角三维点跟踪技术可以作为一个“实用工具”,那么在实际生活或者产业应用中,你觉得它最可能在哪些领域率先发挥巨大作用?比如,除了自动驾驶和电影特效,还有没有其他你觉得特别有潜力的场景?
2、研究团队不仅发布了跟踪器,还同步发布了训练和评估数据集。这对整个三维跟踪领域,特别是对AI研究社区来说,意味着什么?会不会因此加速这个方向的发展,或者带来一些大家都想不到的创新玩法?
3、虽然文章强调了跟踪器的鲁棒性和精准性,但毕竟是“数据驱动”的模型。对于某些数据稀缺、或者环境极端复杂(比如光线不足、强烈反射、快速形变等)的场景,你觉得这个多视角跟踪器会不会遇到瓶颈?未来还能怎么克服这些挑战呢?
2、研究团队不仅发布了跟踪器,还同步发布了训练和评估数据集。这对整个三维跟踪领域,特别是对AI研究社区来说,意味着什么?会不会因此加速这个方向的发展,或者带来一些大家都想不到的创新玩法?
3、虽然文章强调了跟踪器的鲁棒性和精准性,但毕竟是“数据驱动”的模型。对于某些数据稀缺、或者环境极端复杂(比如光线不足、强烈反射、快速形变等)的场景,你觉得这个多视角跟踪器会不会遇到瓶颈?未来还能怎么克服这些挑战呢?
原文内容

来源:专知本文约1000字,建议阅读5分钟我们提出了首个数据驱动的多视角三维点跟踪器,旨在利用多个相机视角跟踪动态场景中的任意点。
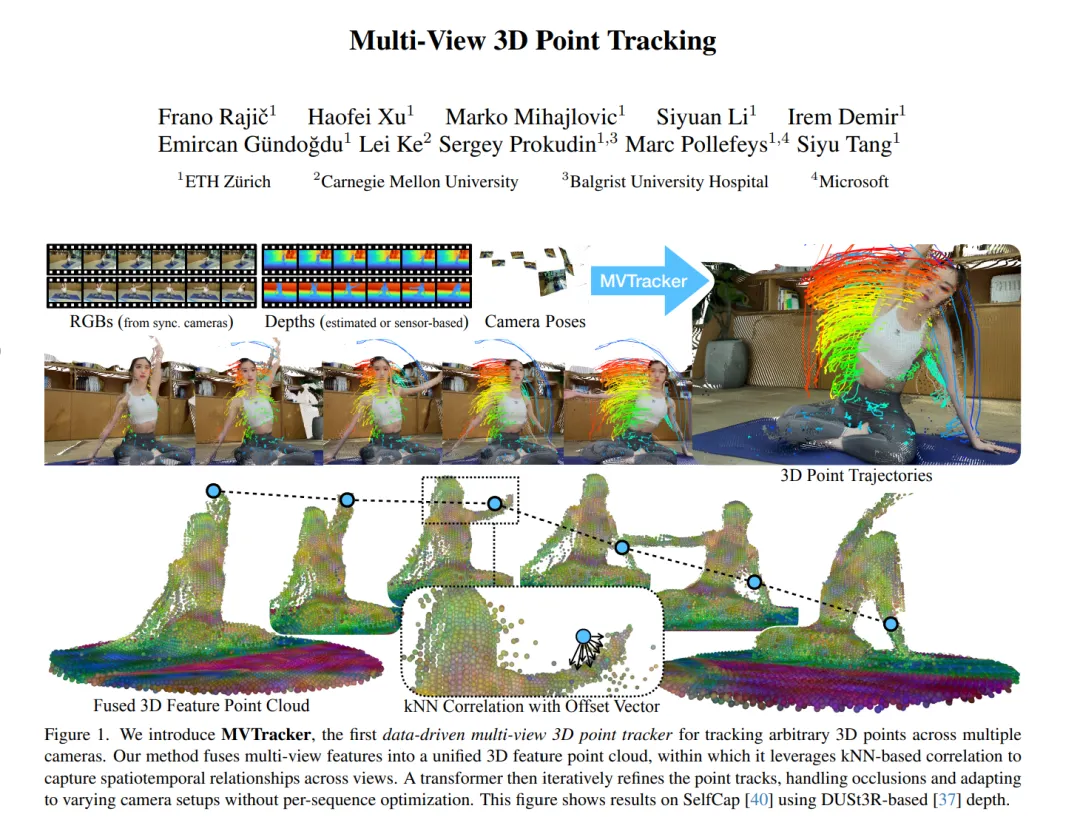
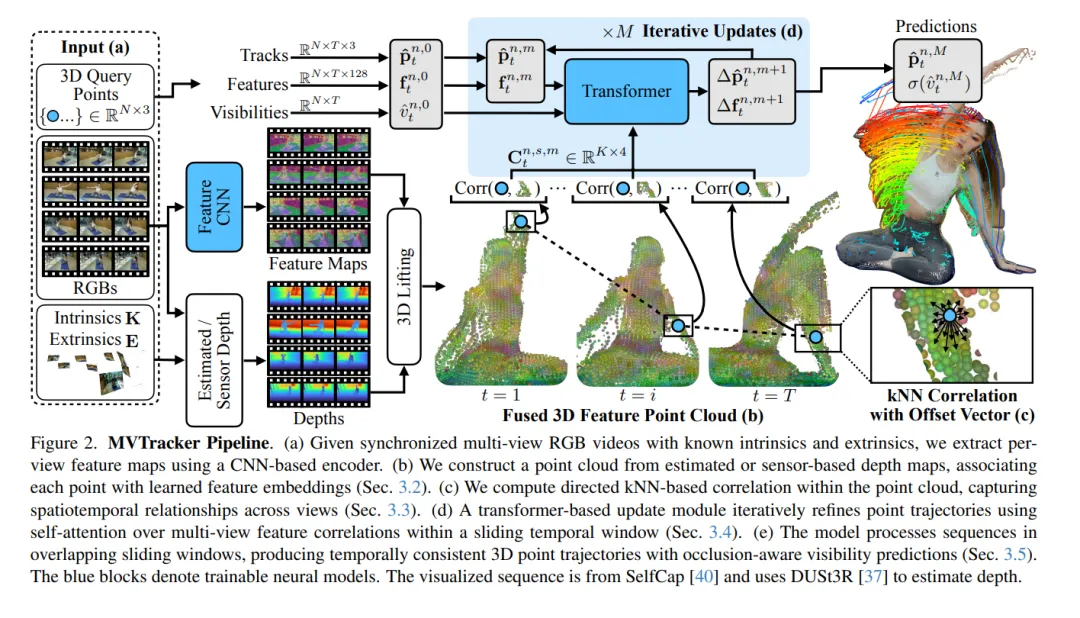
我们提出了首个数据驱动的多视角三维点跟踪器,旨在利用多个相机视角跟踪动态场景中的任意点。与现有的单目跟踪器相比,后者在深度歧义和遮挡情况下表现不佳,或与以往需要超过 20 个相机且每个序列都需要繁琐优化的多摄像头方法不同,我们的前馈模型使用实际数量的相机(例如,四个相机)直接预测三维对应点,从而实现了鲁棒且精准的在线跟踪。给定已知的相机姿态和传感器基于或估算的多视角深度,我们的跟踪器将多视角特征融合成统一的点云,并通过 k 最近邻相关性与基于变换器的更新相结合,可靠地估算长距离三维对应点,即使在遮挡情况下也能保持稳定。我们在 5000 个合成的多视角 Kubric 序列上进行了训练,并在两个真实世界基准上进行了评估——Panoptic Studio 和 DexYCB,分别达到了 3.1 厘米和 2.0 厘米的中位轨迹误差。我们的方法能很好地推广到 1 至 8 个视角的多种相机设置,具有不同的视角和 24 到 150 帧不等的视频长度。通过发布我们的跟踪器以及训练和评估数据集,我们旨在为多视角三维跟踪研究设立新的标准,并为实际应用提供一种实用工具。项目页面:https://ethz-vlg.github.io/mvtracker 。