CL-Splats提出一种基于高斯泼洒的三维持续学习方法,通过局部优化和变更检测,实现高效的三维场景重建和更新。
原文标题:【ICCV2025】CL-Splats:结合局部优化的高斯泼洒持续学习方法
原文作者:数据派THU
冷月清谈:
本文介绍了一种名为CL-Splats的创新方法,用于在动态三维环境中进行持续学习。该方法基于高斯泼洒技术,能够从稀疏的场景采样中增量式地更新三维表示。CL-Splats的核心在于其鲁棒的变更检测模块,该模块可以有效区分场景中的动态和静态部分,从而实现局部优化,显著降低计算成本,避免全局重新优化。此外,CL-Splats还支持场景状态的存储和恢复,为时间分段处理和新型场景分析任务提供了便利。
该研究针对机器人技术、混合现实和具身智能等领域对场景表示实时更新的需求,提供了一种高效且高质量的解决方案。通过实验验证,CL-Splats在重建质量上优于现有技术,同时保持了高效的更新速度,为三维场景重建的实时自适应性奠定了基础。该研究团队将在相关网站上公开源代码和数据集。
该研究针对机器人技术、混合现实和具身智能等领域对场景表示实时更新的需求,提供了一种高效且高质量的解决方案。通过实验验证,CL-Splats在重建质量上优于现有技术,同时保持了高效的更新速度,为三维场景重建的实时自适应性奠定了基础。该研究团队将在相关网站上公开源代码和数据集。
怜星夜思:
1、CL-Splats 如何在动态环境中准确区分静态和动态部分?这种区分对于优化性能至关重要,但实际应用中,光照变化、阴影等因素可能会造成干扰,研究者们是如何解决这些问题的?
2、CL-Splats 提到支持场景状态的存储和恢复,这在哪些实际应用中会特别有用?除了文章中提到的时间分段处理和新型场景分析,还有没有其他的应用场景?
3、CL-Splats 基于高斯泼洒技术,这种技术相比于传统的 mesh 模型,有哪些优势和劣势?在选择三维表示方法时,应该如何权衡不同的技术方案?
2、CL-Splats 提到支持场景状态的存储和恢复,这在哪些实际应用中会特别有用?除了文章中提到的时间分段处理和新型场景分析,还有没有其他的应用场景?
3、CL-Splats 基于高斯泼洒技术,这种技术相比于传统的 mesh 模型,有哪些优势和劣势?在选择三维表示方法时,应该如何权衡不同的技术方案?
原文内容

来源:专知本文约1000字,建议阅读5分钟本文提出 CL-Splats,一种基于高斯泼洒(Gaussian Splatting)的三维表示持续学习方法,可从稀疏的场景采集中增量式地更新三维表示。
在动态三维环境中,准确地随时间更新场景表示对机器人技术、混合现实和具身智能等应用至关重要。随着场景不断变化,迫切需要高效方法将这些变化纳入重建中,以在避免整体重新优化带来的高昂计算成本的同时,保持最新且高质量的重建结果。
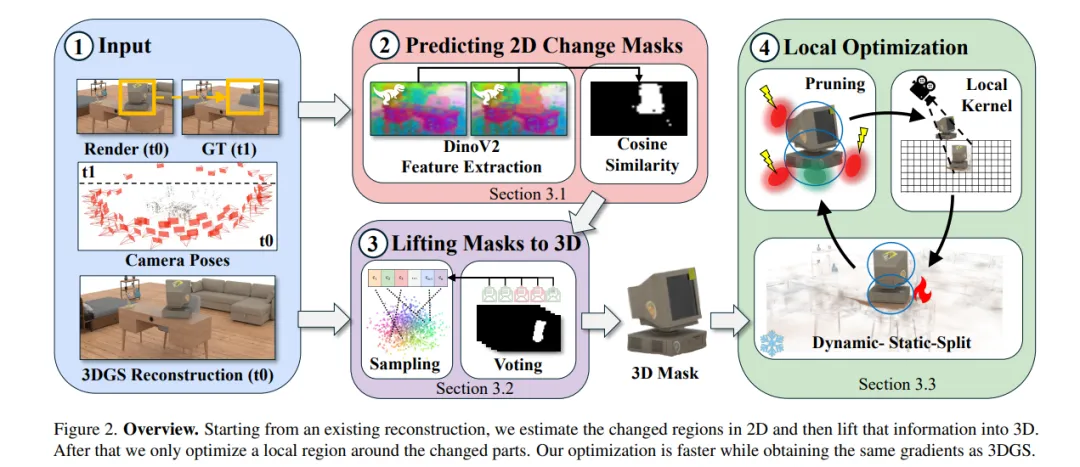
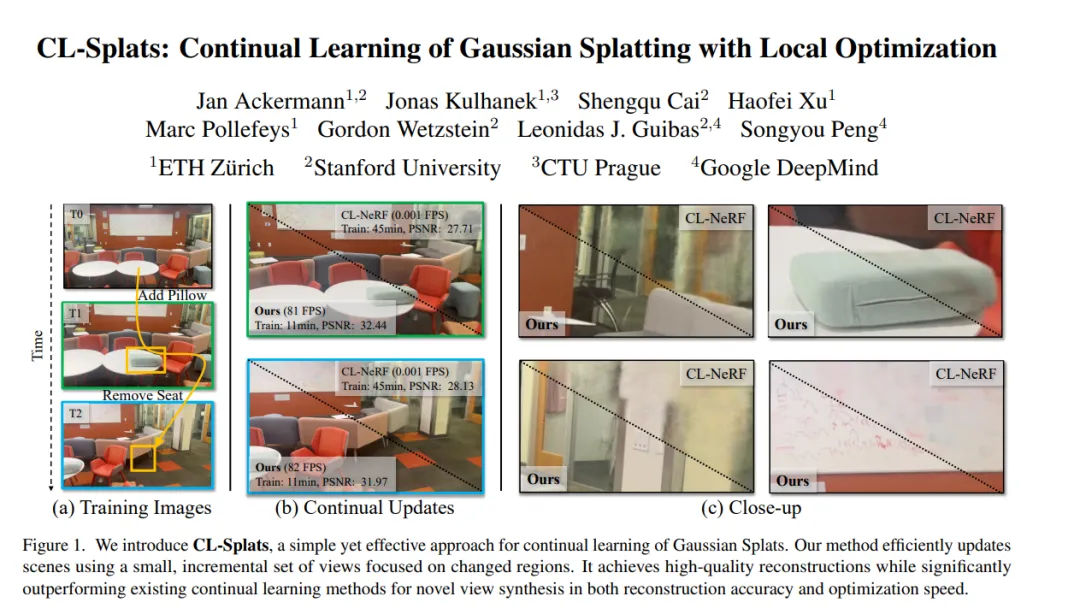
本文提出 CL-Splats,一种基于高斯泼洒(Gaussian Splatting)的三维表示持续学习方法,可从稀疏的场景采集中增量式地更新三维表示。CL-Splats 引入了一个鲁棒的变更检测模块,用于区分场景中的动态与静态部分,从而实现局部优化,避免不必要的全局计算开销。
此外,CL-Splats 支持场景状态的存储与恢复,有助于时间分段处理及新型场景分析任务的开发。大量实验表明,CL-Splats 在实现高效更新的同时,重建质量优于现有最先进方法,为未来三维场景重建任务中的实时自适应奠定了坚实基础。
我们将在 https://cl-splats.github.io/ 发布源码及所构建的合成与真实数据集。