华人团队Genesis AI获1.05亿美元种子轮融资,发力具身智能,旨在通过结合物理模拟、生成式AI和机器人数据,实现体力劳动自动化。
原文标题:一亿美金种子轮,刷新硅谷具身智能融资记录!周衔、许臻佳、李旻辰等华人合伙创业
原文作者:机器之心
冷月清谈:
怜星夜思:
2、文章提到 Genesis AI 的目标是实现体力劳动的自动化,你认为在哪些行业或领域,具身智能最有可能率先取得突破性进展?
3、Genesis AI 团队成员背景横跨学术界和工业界,你认为这种组合对于初创公司来说,最大的优势是什么?可能存在的挑战又是什么?
原文内容
编辑:张倩
这家公司要把人类从体力劳动中解放出来。
前段时间,「隐身」许久的 Ilya Sutskever 罕见露面,还在多伦多大学做了个演讲。他在演讲中提到,终有一天,AI 会完成人类能够完成的所有工作。这将带来人类有史以来最大的挑战,但也蕴含着巨大的机遇。
这几年,AI 的进展有目共睹。不过,大家也常调侃说,「本来想让 AI 去扫地、做饭、带孩子,我去写诗、唱歌、陶冶情操,结果现在反过来了」。这一调侃揭示了一个尴尬的现状:AI 的「大脑」和「本体」进步速度不同步,只解锁了一些脑力劳动,体力劳动涉足非常有限。
这两年比较火的「具身智能」方向就是来解决这个问题的。不过,大家期待的具体智能界的「OpenAI」还没出现,也没有一个类似 Transformer 的通用技术架构。
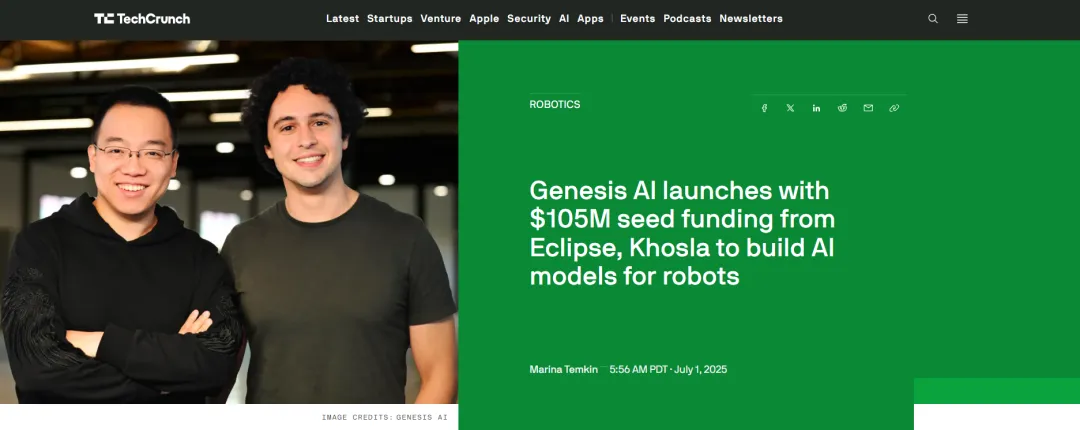
最近,硅谷的一家新成立的名叫「Genesis AI」的公司吸引了我们的注意,他们在最近的种子轮融资中拿到了 1.05 亿美元。据外媒 TechCrunch 报道,这轮融资由美国顶级风投机构 Khosla Ventures、Eclipse 联合领投。前者是 OpenAI 的最早的机构投资者,后者是特斯拉产业背景团队机器人赛道的专业机构。
这应该是是硅谷具身智能赛道至今最大规模的种子轮融资,超过了此前该赛道明星创企 Physical Intelligence 的记录。同时参与投资的还有谷歌前董事长 Eric Schmidt、欧洲科技大亨 Xavier Niel、法国中央银行 BPI、红杉中国等。
「Genesis」这个名字是不是听起来有点耳熟?没错,它和知名具身智能项目、GitHub 25k star 量的 Genesis 一脉相承。「Genesis」是一个生成式物理引擎,由 CMU 联合 20 多所研究实验室历时两年联合开发,能够生成 4D 动态世界、模拟广泛的材料和物理现象,专为通用机器人、具身 AI 和物理 AI 应用而设计。
该项目效果惊艳,当时引发了不小的轰动,很多人从它身上看到了具身智能的未来(参见《》)。与此同时,它也成为了近几年具身智能最受瞩目的项目之一。而且 Genesis 社区也已成为机器人仿真领域最大的开源社区。

Genesis 生成的物理世界。提示:手持棍棒的迷你版悟空在桌面上飞奔 3 秒,然后跳到空中,落地时右臂向下摆动。镜头从他的脸部特写开始,然后稳定地跟随角色,同时逐渐缩小。当悟空跳到空中时,在跳跃的最高点,动作暂停几秒钟。镜头围绕角色 360 度旋转,然后缓慢上升,然后继续动作。
项目核心成员此次集体投身创业,自然引发了外界广泛关注。在拿到如此充足的资金之后,这个团队具体打算做什么?以下是我们了解到的关于该公司的信息。
Genesis AI:刷新硅谷具身智能融资记录的团队
Genesis AI 的创始团队由来自 Mistral AI、英伟达、谷歌、苹果、CMU、MIT、斯坦福、哥伦比亚大学和马里兰大学的顶尖学术和工业界技术人才组成,在物理模拟、图形学、机器人技术和大规模 AI 模型训练与部署方面拥有深厚积累。
与具身领域常见的由资深教授主导研发带队创业的模式不同,这是一支由刚毕业的年轻博士组成的全明星阵容。他们均来自不同的顶尖研究机构,是 AI 及机器人领域最活跃的科研新锐。
创始人及 CEO 周衔。周衔去年底刚从卡内基梅隆大学毕业并获得机器人学博士。他本科毕业于南洋理工大学,主导了登上 Science Robotics 杂志的组装宜家家居的机器人研究。他博士期间的研究方向涵盖世界模型,模仿学习,强化学习。他提出了生成式仿真的新范式,并在学界发起并领导了 Genesis 的开源项目。

联合创始人 Théophile Gervet,博士毕业于 CMU,Mistral 早期创始团队成员和多模态模型负责人。他主导研发了 Mistral 第一个多模态大模型 Pixtral 12B,用 Llama-3.2 90B 七分之一的模型大小实现 7 倍性能的超越。他还主导了 Mixtral 8x7B 的开发,成功实现了 GPT-3.5 及 Llama 2 70B 级别模型的性能,并显著降低了推理速度和成本。此外,在加入 Mistral 之前,Theo 也是 Skild AI 的创始成员之一。
公司官网列举出的联创中,也有不少我们熟悉的华人面孔:
许臻佳,此前备受关注的斯坦福刷盘子机器人 UMI 项目还有目前最流行的机器人网络架构 Diffusion Policy 的共同一作。他于 2024 年从哥伦比亚大学 / 斯坦福大学博士毕业,师从 Shuran Song。
他此前在英伟达 GEAR(Generalist Embodied Agent Research)团队领导 GR00T 项目的机器人数据收集和真机系统工作,并多次获得 RSS、CoRL 等机器人顶会最佳论文及提名。
王尊玄,今年刚从 MIT CSAIL 博士毕业,师从机器人领域大牛、麦克阿瑟「天才」奖得主、MIT 人工智能实验室主任 Daniela Rus。他的研究领域横跨数据、大脑和本体,这也是具身智能的几个核心技术方向。在此之前,他曾在大模型公司 Liquid AI 负责基础模型架构的研发。

乔怿凌,马里兰大学博士,师从图形学泰斗 Ming C.Lin 和机器人学泰斗 Dinesh Manocha。他是 Meta 奖学金获得者,在图形学、可微物理仿真方向做出多项横跨刚体 / 流体 / 柔性材料的开创性工作。
宋运龙,无人机强化学习竞速领域开拓者以及高性能仿真工具 Flightmare 的主要开发者,苏黎世大学博士,师从机器⼈学泰⽃ Davide Scaramuzza。
他曾通过强化学习算法战胜人类世界冠军,相关成果登上 Science Robotics 杂志封面。

李旻辰,卡内基梅隆大学图形学方向助理教授,宾夕法尼亚大学博士,曾获 SIGGRAPH2021 年度杰出博士论文奖。此外,他还是目前图形学领域非常有影响力的求解复杂 contact 模型的算法 IPC 的发明人。
这支年轻团队的背后集结了过去几年具身领域多项重要技术成果,横跨真机数采、模仿学习、强化学习和物理仿真,这也是华人主导的创业团队在硅谷历史上完成的最大的种子轮融资。
除了学界新锐外,Genesis AI 披露的早期创始团队成员还包括多位工程界的大牛,包括 H Company 多模态模型负责人 Antoine d’Andigne、苹果 Apple Intelligence 多模态模型负责人、谷歌工程总监 Rachid El Guerrab、英伟达 GVDB 架构师 Rama Hoetzlein、原版 Pytorch 和多个开源 GPU 编译器框架(VeriGPU/DeepCL/Coriander)创作者 Hugh Perkins、以及 Roblox 首席工程师 Hongyi Yu 等。
拿到 1 亿美元之后,Genesis AI 打算做什么?
拿到如此丰厚的融资之后,Genesis AI 打算做什么呢?据了解,他们的目标是打造一个极高人才密度的创新组织,实现最强的物理智能,并在未来实现体力劳动的自动化。
要实现这一目标,Genesis 首先要解决的是物理智能领域普遍存在的「数据魔咒」问题。
为此,他们正在打造一个可扩展的通用数据引擎,把高精度物理模拟、多模态生成式 AI 和大规模真实机器人数据整合在一起。
他们并不押注在任意一条单一的技术路线,而是希望在各个通向机器人基础模型的技术模块上都实现世界级的突破,并成为首个真正实现仿真与现实数据闭环(closed-loop)的团队。
他们的仿真系统完全自主研发,能大规模生成高质量的合成数据,同时配合更高效、可扩展的真实世界数据采集系统。这种「合成数据 + 真实数据」的双引擎模式,打破了传统的数据壁垒,能够收集大规模、多样性的高质量数据,用于训练机器人基础模型。
物理智能基础模型是 AI 领域的 next big thing,最强物理智能对世界和产业的影响更加深远和颠覆性。
在 DeepSeek 之后,我们也期待能够出现一家华人主导的年轻科学家团队,成为物理智能领域的 OpenAI,有机会真正的做到世界级的「引领」。
不过,该公司目前的具体产品信息仍较少。我们了解到,他们的下一个 milestone 可能将于今年年底发布。至于它是否足够惊艳,我们拭目以待。

© THE END
转载请联系本公众号获得授权
投稿或寻求报道:liyazhou@jiqizhixin.com