Visual-ARFT 让视觉语言模型具备了像人类一样使用工具(搜索、代码)解决复杂视觉问题的能力,并在多项测试中超越 GPT-4o。
原文标题:让视觉语言模型像o3一样动手搜索、写代码!Visual ARFT实现多模态智能体能力
原文作者:机器之心
冷月清谈:
怜星夜思:
2、MAT-Bench 评测基准的提出对于多模态智能体的发展有哪些意义?你认为未来多模态智能体评测基准应该关注哪些方面?
3、Visual-ARFT 在 MAT-Coding 任务中,能够通过编写和执行代码来处理图像,你觉得这种能力在实际应用中有什么价值?有哪些潜在的应用场景?
原文内容

在大型推理模型(例如 OpenAI-o3)中,一个关键的发展趋势是让模型具备原生的智能体能力。具体来说,就是让模型能够调用外部工具(如网页浏览器)进行搜索,或编写/执行代码以操控图像,从而实现「图像中的思考」。
尽管开源研究社区在纯文本的智能体能力方面(比如函数调用和工具集成)已取得显著进展,但涉及图像理解与操作的多模态智能体能力及其对应的评估体系仍处于起步阶段。
因此,上海交大、上海 AI Lab、港中文、武汉大学的研究团队最新推出的多模态智能体训练方法 Visual-ARFT(Visual Agentic Reinforcement Fine-Tuning),专为赋予视觉语言模型(LVLMs)以「工具智能体」能力而设计。
并且,Visual-ARFT 项目已全面开源(包含训练、评测代码,数据和模型)。如果你对多模态模型、强化学习、视觉语言理解感兴趣,不妨一起来探索更多可能性吧!
-
论文标题:Visual Agentic Reinforcement Fine-Tuning
-
arXiv 地址: https://arxiv.org/pdf/2505.14246
-
代码地址: https://github.com/Liuziyu77/Visual-RFT/tree/main/Visual-ARFT
Visual-ARFT 让模型不仅能看图、能理解,还能「动脑推理、动手操作」,主要包括以下三个方面的核心能力:
-
模型能够自动调用搜索引擎查资料或者编写并执行 Python 代码处理图像;
-
面对复杂任务,能够自主拆解问题、规划步骤、调用合适工具完成任务;
-
支持多步推理、多模态输入,具备强大的跨模态泛化能力!
如图 1 所示,本文的方法编写并执行 Python 代码以精准读取图像中特定区域的文本(上图),或者通过互联网搜索回答多模态多跳问题(下图)。

图 1. 视觉智能体强化微调(Visual Agentic Reinforcement Fine-Tuning,简称 Visual-ARFT)在执行复杂的多模态推理任务中展现出显著优势,例如:(上图)编写并执行 Python 代码以精准读取图像中特定区域的文本,以及(下图)通过互联网搜索回答多跳问题。
同时,为了评估模型的工具调用和多模态推理能力,团队构建了智能体评测基准 MAT-Bench (Multimodal Agentic Tool Bench)。测试结果显示,Visual-ARFT 在多个子任务中全面超越 GPT-4o,通过调用工具 ——「写代码 + 查资料」,展现出了完成复杂多模态视觉任务的强大潜力。
方法概览
Visual-ARFT 基于强化微调的训练策略,使用 GRPO 的算法来更新模型权重。团队针对多模态智能体完成任务的流程,对 LVLM 的多步工具调用和问题回答设计了 rule-based verifiable reward。通过简单高效的 reward 设计,驱动模型自主探索工具的使用方法和思考模式。
团队在训练中使用几十到最多 1.2k 的训练数据,通过少量数据实现了对模型的多模态智能体能力的训练。
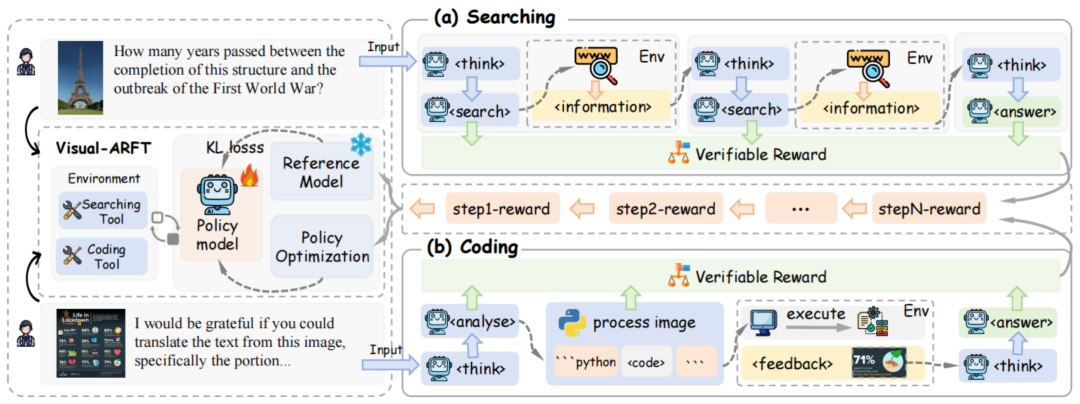
图 2. Visual-ARFT 框图。主要针对 Agentic Search 和 Agentic Coding 两类任务的多步推理和工具调用能力进行优化。
Visual-ARFT 针对以下两类高难度任务场景进行强化训练:
-
Agentic Search:模型面对多模态的多跳复杂问题,先对视觉信息进行分析和推理,然后能够主动进行任务分解、规划信息检索路径,通过调用搜索引擎获取外部知识并整合作答。
-
Agentic Coding:模型面对模糊、旋转、曝光过强等复杂图像,能主动生成 Python 代码完成图像修复,或剪裁图像,提取关键区域,并据此完成视觉问答。
在这一过程中,模型并非简单输出结果,而是具备完整的推理结构:
每一步都以 <think> 思考引导、<search> 检索信息、<code> 编写程序、<answer> 给出结论,真正形成可解释的多模态认知路径。
MAT 基准
团队发布了全新的多模态智能体评测基准:MAT(Multimodal Agentic Tool Bench),专门评估多模态工具调用能力:
-
MAT-Search:包含 150 道多跳视觉问答任务,人工标注 + 搜索推理;
-
MAT-Coding:包含 200 道复杂图像问答任务。模型可以直接作答或通过调用代码工具处理图像,辅助作答。
这一基准填补了当前开源模型在「多模态智能体以及工具调用」方面的评估空白。
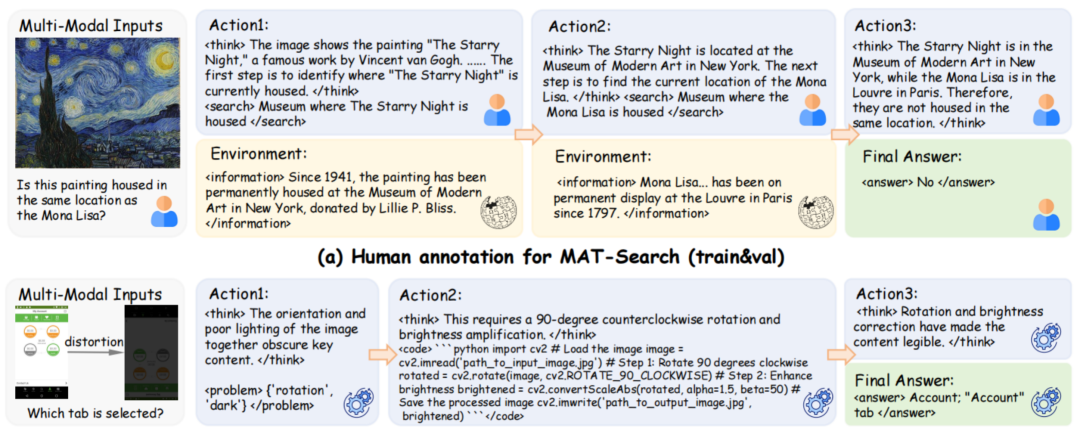
图 3. MAT 数据标注过程。MAT-Search 采用人工标注方法构建多模态多跳推理 VQA 数据,MAT-Coding 采用自动化流程构造针对 Agentic Coding 任务的 VQA 数据。
Visual-ARFT 实验结果
团队基于 Qwen2.5-VL 模型在 MAT 上对本文方法进行了测试。结果显示,无论在 MAT-Search 还是在 MAT-Coding 上,本文方法都较 baseline 有了显著的提升,并击败了 GPT-4o 模型。
相较于 baseline 模型直接推理的方式,本文方法通过让 LVLM 学会推理与调用工具,在解决复杂的多模态任务时,更加的得心应手。此外,团队观察到 OpenAI-o3 模型在一众开源闭源中取得了遥遥领先的性能,尤其是在 MAT-Coding 上,凭借其多模态推理和工具调用能力,断层式超越了 GPT-4o 模型。
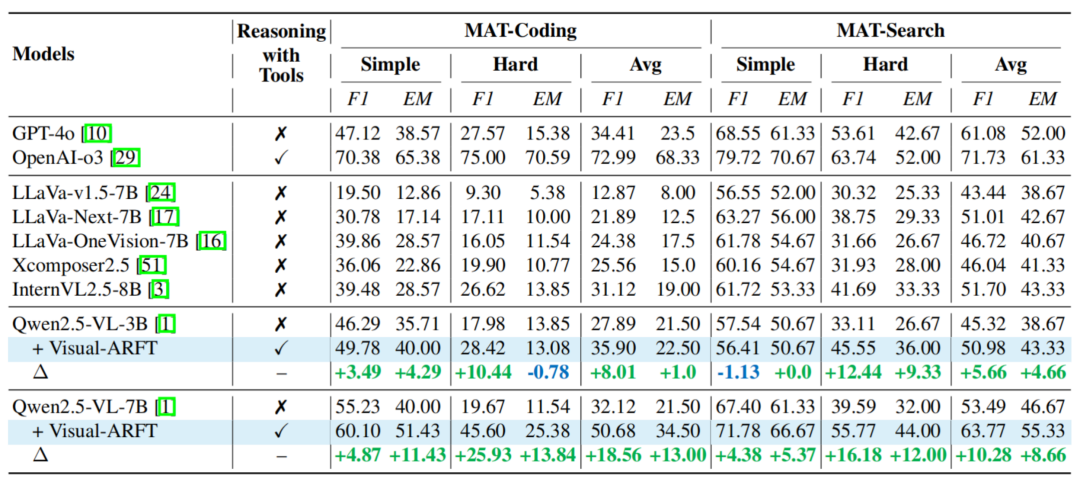
表 1. MAT 测试结果。 Visual-ARFT 相较 baseline 取得了显著性能提升,击败 GPT-4o。开闭源模型距离 OpenAI-o3 模型存在较大性能差距。
为了测试本文方法的泛化能力,团队选取了 4 个 Out of Domain 的传统 MultihopQA Benchmark 来测试他们的模型,包括 2wikimlutihopQA,HotpotQA,MuSiQue 和 Bamboogle。
结果显示基于 Visual-ARFT 的 Qwen2.5-VL 模型虽然仅仅使用几十条数据进行训练,但是模型获得在这些多跳推理数据集上展现出了显著的性能提升,并击败了其他基于强化学习的方法。
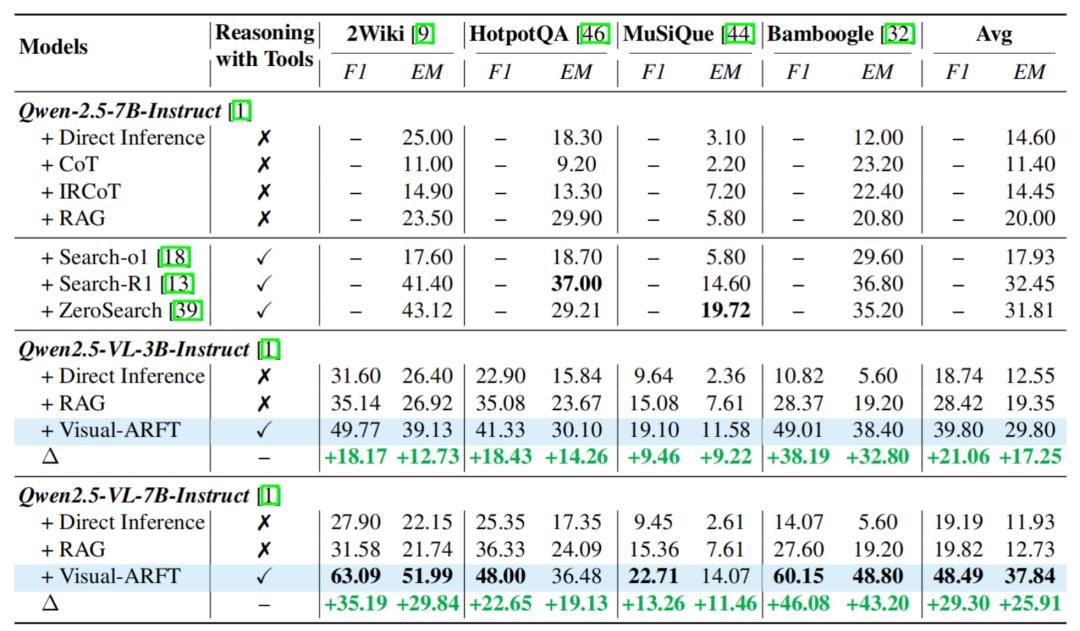
表 2. 传统 MultihopQA 测试结果。团队在 Out of Domain 的多个 multihopQA 上测试了本文方法,展现出 Visual-ARFT 的强大泛化能力。

© THE END
转载请联系本公众号获得授权
投稿或寻求报道:liyazhou@jiqizhixin.com