数据派THU提出URBAN-SIM城市仿真方案,加速自主微型出行发展。包含城市生成、动态生成和场景采样模块,提升AI智能体在城市移动、导航和穿越方面的能力。
原文标题:【CVPR2025】通过可扩展城市仿真迈向自主微型出行
原文作者:数据派THU
冷月清谈:
怜星夜思:
2、URBAN-BENCH 使用了轮式和腿式机器人进行测试,你觉得未来哪种机器人会更适合城市微型出行?为什么?
3、文章提到了微型出行可以作为传统机动车出行的替代方案,你认为微型出行在解决城市交通问题方面有哪些优势和劣势?
原文内容

来源:专知本文约1000字,建议阅读5分钟在本研究中,我们提出了一种可扩展城市仿真解决方案,以推进自主微型出行的发展。

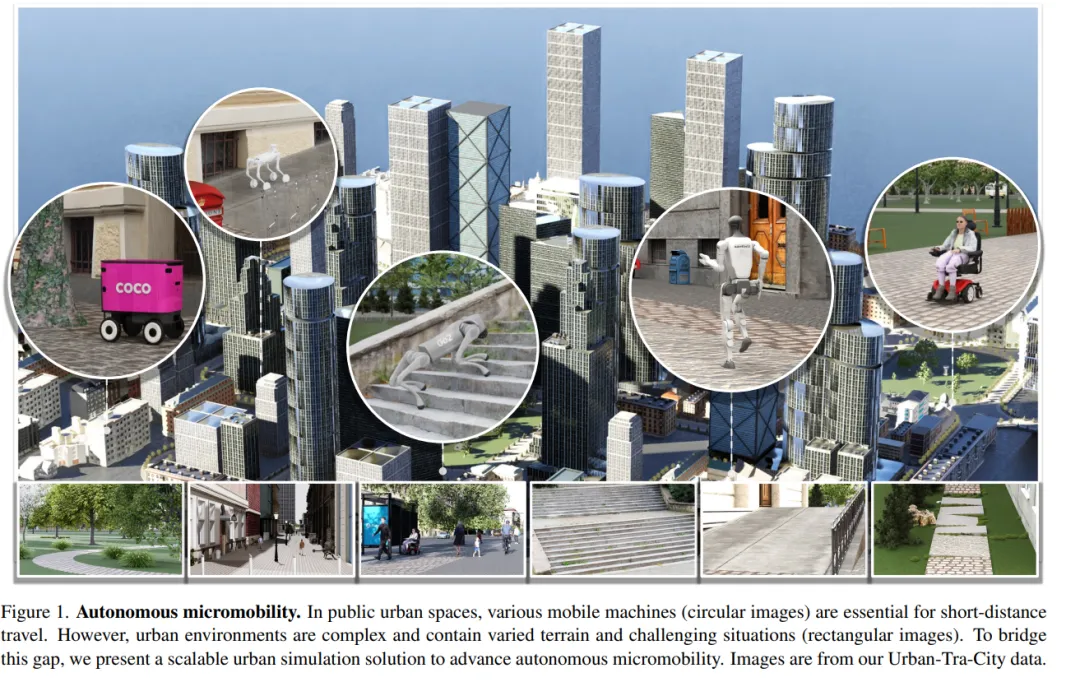
微型出行(Micromobility)是指使用轻量化的移动设备在城市公共空间中移动,例如配送机器人和电动代步车。它正逐渐成为传统机动车出行的有前景替代方案。目前的微型出行设备主要依赖人工操作(包括现场或远程控制),在面对充满不可预测障碍物与行人的繁忙城市环境时,存在安全性与效率方面的明显问题。利用人工智能智能体协助人类操控微型出行设备,为提升出行的安全性与效率提供了一种可行方案。
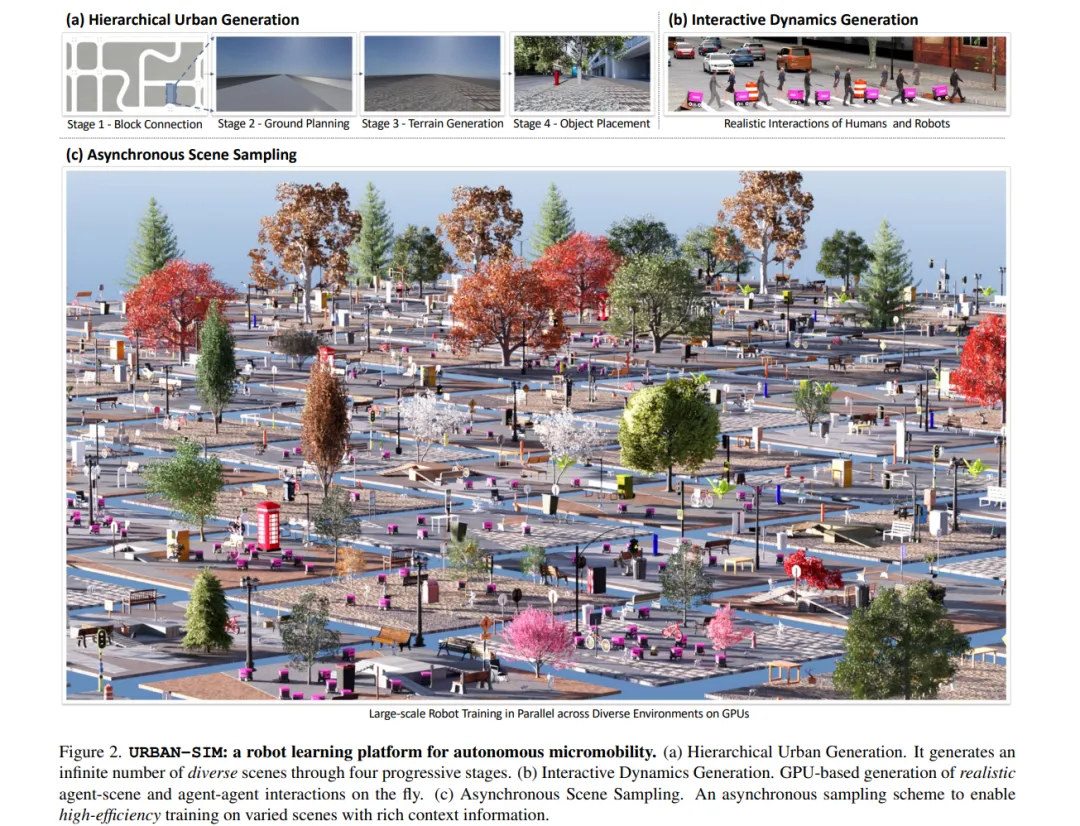
在本研究中,我们提出了一种可扩展城市仿真解决方案,以推进自主微型出行的发展。首先,我们构建了 URBAN-SIM ——一个高性能机器人学习平台,支持在交互式城市场景中对具身智能体进行大规模训练。URBAN-SIM 包含三个关键模块:
-
分层式城市生成流程(Hierarchical Urban Generation pipeline),
-
交互动态生成策略(Interactive Dynamics Generation strategy),
-
异步场景采样机制(Asynchronous Scene Sampling scheme),
这些模块共同提升了机器人学习过程中仿真环境的多样性、真实性与训练效率。
随后,我们提出 URBAN-BENCH ——一个评估AI智能体实现自主微型出行能力的任务与基准套件。URBAN-BENCH 包含基于三项核心技能(城市移动、城市导航、城市穿越)的八个关键任务,用于全面衡量AI智能体的性能表现。
我们在这些任务中评估了四种具身形式各异的机器人,包括轮式与腿式机器人。实验涵盖多样地形与城市结构,揭示了每种机器人在城市出行任务中的优势与局限性。