数据派THU提出神经运动模拟器(MoSim),一种强化学习世界模型。它预测具身系统未来物理状态,提升技能习得效率和泛化能力,为具身智能指明方向。
原文标题:【CVPR2025】神经运动模拟器:在强化学习中突破世界模型的极限
原文作者:数据派THU
冷月清谈:
本文介绍了神经运动模拟器 (MoSim),这是一种基于当前观测和动作预测具身系统未来物理状态的世界模型。MoSim 专注于模拟具身系统的运动动态,并在物理状态预测方面达到领先水平。MoSim 的优势在于,它不仅能够促进在想象世界中的高效技能习得,甚至可以实现零样本强化学习。此外,MoSim 还能将无模型强化学习算法转化为基于模型的方法,从而有效地将物理环境建模与 RL 算法开发解耦,进而显著提高样本利用效率和泛化能力,为开发更通用、更强大的具身智能系统提供了新思路。
怜星夜思:
1、MoSim 如何实现零样本强化学习?它的核心机制是什么,可以详细解释一下吗?
2、MoSim 将物理环境建模与 RL 算法开发解耦,这种解耦方式有什么好处?为什么能够提高样本利用效率和泛化能力?
3、从长远来看,你觉得专注于运动动态的世界模型,在具身智能领域有哪些潜在的应用场景?除了文章中提到的技能习得和强化学习,还有哪些值得期待的方向?
2、MoSim 将物理环境建模与 RL 算法开发解耦,这种解耦方式有什么好处?为什么能够提高样本利用效率和泛化能力?
3、从长远来看,你觉得专注于运动动态的世界模型,在具身智能领域有哪些潜在的应用场景?除了文章中提到的技能习得和强化学习,还有哪些值得期待的方向?
原文内容

来源:专知本文约1000字,建议阅读5分钟
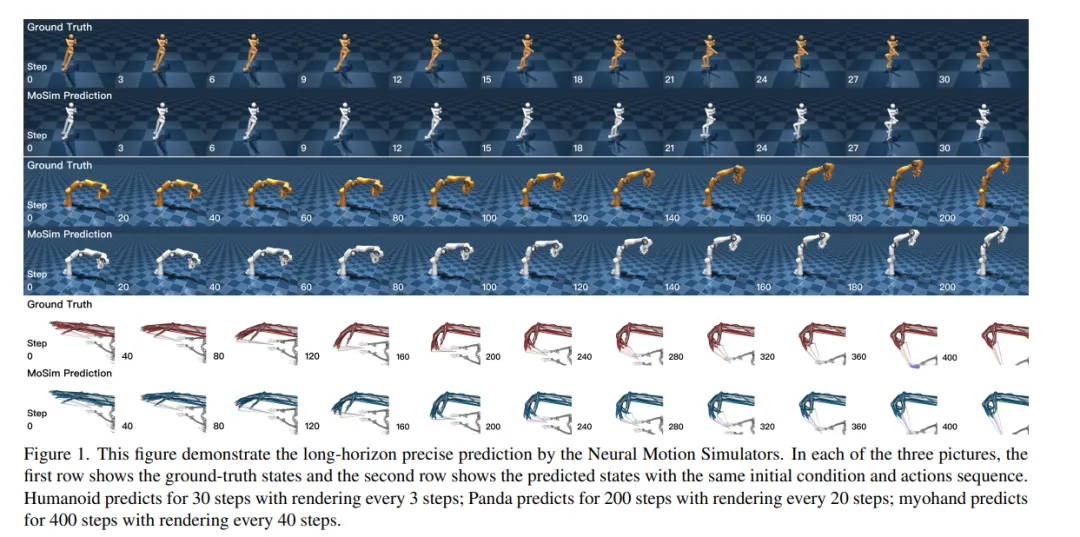
我们提出了神经运动模拟器 (MoSim),这是一种基于当前观测和动作预测具身系统未来物理状态的世界模型。
具身系统不仅要模拟外部世界的模式,还需理解自身的运动动态。运动动态模型对于高效的技能习得和有效的规划至关重要。在本工作中,我们提出了神经运动模拟器 (MoSim),这是一种基于当前观测和动作预测具身系统未来物理状态的世界模型。MoSim 在物理状态预测方面达到了最先进的性能,并在多项下游任务中展现出竞争力的表现。该研究表明,当世界模型足够精确并能进行精确的长远预测时,它不仅能促进在想象世界中的高效技能习得,甚至可实现零样本强化学习。此外,MoSim 能将任何无模型强化学习(RL)算法转化为基于模型的方法,从而有效地将物理环境建模与 RL 算法开发解耦。这种分离使得 RL 算法与世界模型各自可以独立进步,从而显著提高样本利用效率和增强泛化能力。我们的研究表明,专注于运动动态的世界模型为开发更通用、更强大的具身系统指明了一个有前途的方向。