新加坡国立大学提出GEAL,利用2D大模型赋能3D可交互区域预测,通过跨模态对齐提升泛化性与鲁棒性,为机器人操作等应用提供新思路。
原文标题:CVPR 2025 | 2D 大模型赋能3D Affordance 预测,GEAL助力可泛化的3D场景可交互区域识别
原文作者:机器之心
冷月清谈:
怜星夜思:
2、GEAL 通过 Gaussian Splatting 将 3D 点云渲染成 2D 图像,这样做的好处是可以利用预训练的 2D 模型。但是,渲染过程是否会引入新的噪声或损失原始 3D 数据的信息?GEAL 如何确保渲染后的 2D 图像能够准确地反映原始 3D 场景的可交互区域?
3、GEAL 在 Corrupt Data Benchmark 上表现出了良好的鲁棒性。那么,在真实机器人应用场景中,可能还会遇到哪些更复杂的、Corrupt Data Benchmark 没有考虑到的噪声或干扰?GEAL 需要如何改进才能更好地应对这些实际挑战?
原文内容

GEAL 由新加坡国立大学的研究团队开展,第一作者为博士生鲁东岳,通讯作者为该校副教授 Gim Hee Lee,团队其他成员还包括孔令东与黄田鑫博士。
-
主页:https://dylanorange.github.io/projects/geal/
-
论文:https://arxiv.org/abs/2412.09511
-
代码:https://github.com/DylanOrange/geal
在现实世界中,如何让智能体理解并挖掘 3D 场景中可交互的部位(Affordance)对于机器人操作与人机交互至关重要。所谓 3D Affordance Learning,就是希望模型能够根据视觉和语言线索,自动推理出物体可供哪些操作、以及可交互区域的空间位置,从而为机器人或人工智能系统提供对物体潜在操作方式的理解。
与 2D 任务相比,3D 数据的获取与高精度标注通常更为困难且成本高昂,这使得大规模高质量的 3D 标注数据十分稀缺,也阻碍了模型在新物体或场景中的泛化。与此同时,现有 3D 多依赖几何与位置编码来表征空间结构,难以从外观语义中充分汲取上下文信息,因而在传感器不准、场景复杂或处理误差等情形下更易受到噪声影响,导致其鲁棒性不足,难以稳定应对真实环境中的多变挑战。
为克服标注与数据分布限制,一些工作尝试将 2D 视觉模型或大语言模型融入 3D 场景理解。但由于 3D 与 2D 的特征存在显著模态差异,以及受限于对空间几何关系与纹理细节的保留,直接对接往往导致可交互区域定位不准确或易受点云噪声的干扰,难以在真实复杂场景中保持鲁棒性和通用性。因此,如何充分利用大规模预训练的 2D 模型所蕴含的强大表征能力,同时兼顾 3D 模态下细节和结构信息的准确对齐,成为提升 3D Affordance Learning 效果的关键挑战。
针对上述问题,新加坡国立大学的研究团队提出了 GEAL(Generalizable 3D Affordance Learning),无需额外收集与标注大规模 3D 数据,便可借助 2D 基础模型实现对 3D 场景中可交互区域的精确预测。具体而言,GEAL 首先利用 3D Gaussian Splatting 将稀疏点云转换为可在 2D 模型中处理的真实感渲染图,并通过跨模态一致性对齐(Cross-Modal Consistency Alignment)有效融合 2D 视觉与 3D 空间特征,显著提升模型对多种物体与场景的泛化能力。此外,团队还构建了针对真实场景扰动的全新基准数据集,全面评估模型的稳健性。实验结果表明,GEAL 无论在公共数据集还是各种噪声环境下,都显著优于现有方法,为通用且鲁棒的 3D Affordance Learning 提供了新思路。
目前,GEAL 已被 CVPR 2025 接收,论文、代码和模型权重均已公开。
2D-3D 跨模态对齐
完成 3D 可交互区域预测
如图所示,在 GEAL 的整体框架中,我们通过 2D 分支 与 3D 分支的协同合作,将预训练 2D 模型的强语义表达能力注入到稀疏点云的三维世界中,并通过跨模态特征对齐来获得更强的鲁棒性与泛化能力。下面对各个关键步骤加以说明
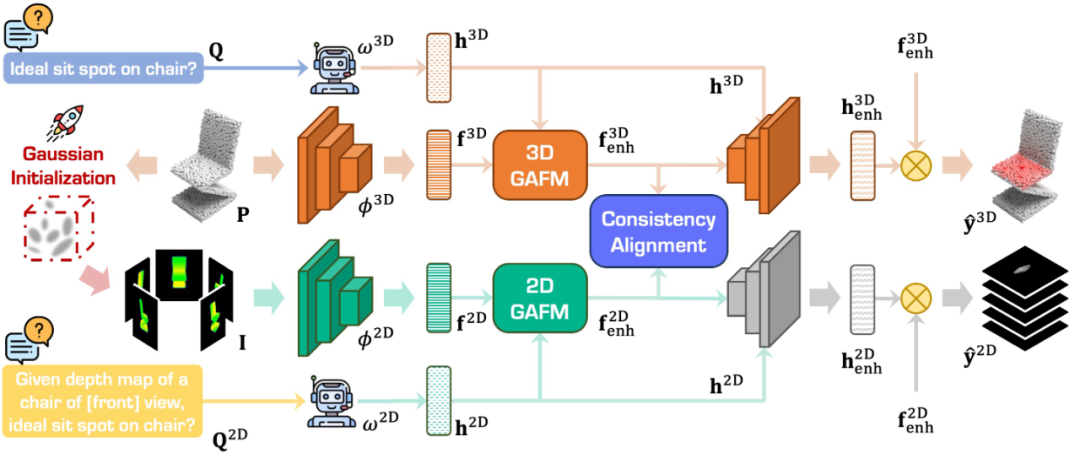
利用 3D Gaussian Splatting 渲染稀疏点云,高效引入 2D 分支
考虑到三维数据通常存在采样稀疏、标注昂贵、遮挡严重等问题,我们在网络结构中单独设置了一个 2D 分支,借助在海量 2D 数据上预训练的视觉 backbone(如 DINOV2),获取包含丰富语义上下文与外观信息的多粒度图像特征,从而为后续的三维功能区域预测提供更具鲁棒性与泛化力的先验。由于该分支与 3D 分支并行存在,我们可在后期设计中灵活地融合并对齐 2D/3D 特征,避免简单拼接带来的模态失配。为了让预训练的 2D 模型充分 “看见” 三维场景的纹理与遮挡信息,GEAL 采用了 3D Gaussian Splatting 技术来渲染点云。具体而言,我们用可学习的高斯基元对每个三维点进行表示,并通过光栅化与 α- 混合在 2D 图像中生成具有深度、透明度与颜色信息的像素,从而获得更为平滑、逼真的二维视图。这些视图不仅能够为 2D 模型提供足以辨别纹理和轮廓的语义特征,还能在后续跨模态步骤中与点云的几何结构建立一一对应关系,为特征对齐打下基础。
跨模态特征对齐
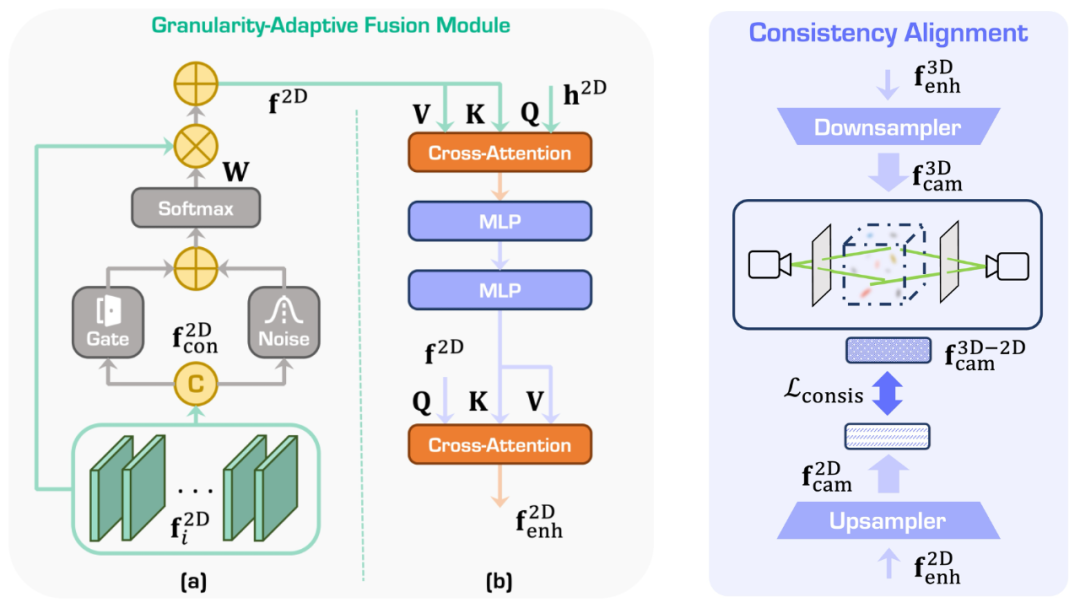
在两条分支分别获得多尺度 2D/3D 特征后,GEAL 通过颗粒度自适应融合模块(Granularity-Adaptive Fusion Module, GAFM) 与一致性对齐模块(Consistency Alignment Module,CAM) 实现语义与几何间的双向对齐。
-
颗粒度自适应融合模块
针对 2D 与 3D 在不同层级上所捕获的细节与全局信息,通过自适应权重聚合和文本引导的视觉对齐,将最相关的多粒度特征与用户指令相互融合。这样既能突出与功能需求紧密关联的目标局部,又确保对全局场景保持整体把握。
-
一致性对齐模块
基于 Gaussian Splatting 所构建的像素 - 点云映射,将 3D 分支提取的点云特征再度渲染至二维平面,与 2D 分支形成逐像素对应,然后通过一致性损失(如 L2 距离)使两者在同一空间区域的表征尽可能相似。这种策略能让 2D 分支的通用语义向 3D 分支扩散,同时也让 3D 分支在几何维度上对 2D 特征形成有益补充,最终实现更准确的可交互区域定位。
Corrupt Data Benchmark 评估鲁棒性
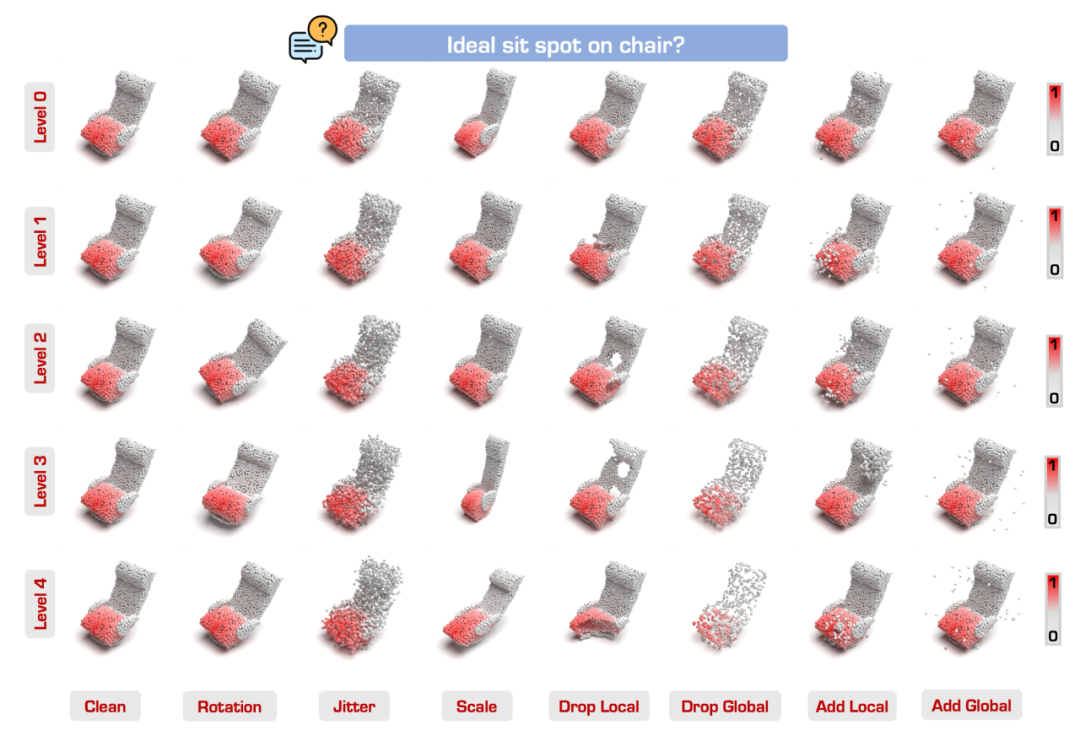
为了更全面地测试 GEAL 在真实干扰环境中的表现,我们基于常见的 PIAD 与 LASO 数据集,构建了包含多种扰动形式的 Corrupt Data Benchmark。它涵盖局部或全局的随机丢失、噪声注入、尺度变化、抖动及旋转等多种干扰场景,模拟复杂感知条件下的真实挑战。实验结果表明,GEAL 在该基准上依然能够保持高精度与鲁棒性,印证了跨模态对齐对于三维功能区域预测在噪声环境中的关键价值。
通过以上几个核心环节,GEAL 成功将 2D 模型的强大语义理解与 3D 数据的空间几何细节有机结合,不仅免去了大规模 3D 标注数据的依赖,还显著提升了可交互区域预测的可靠性与泛化水平,为 3D Affordance Learning 迈向真实应用场景提供了新的技术思路。
实验结果
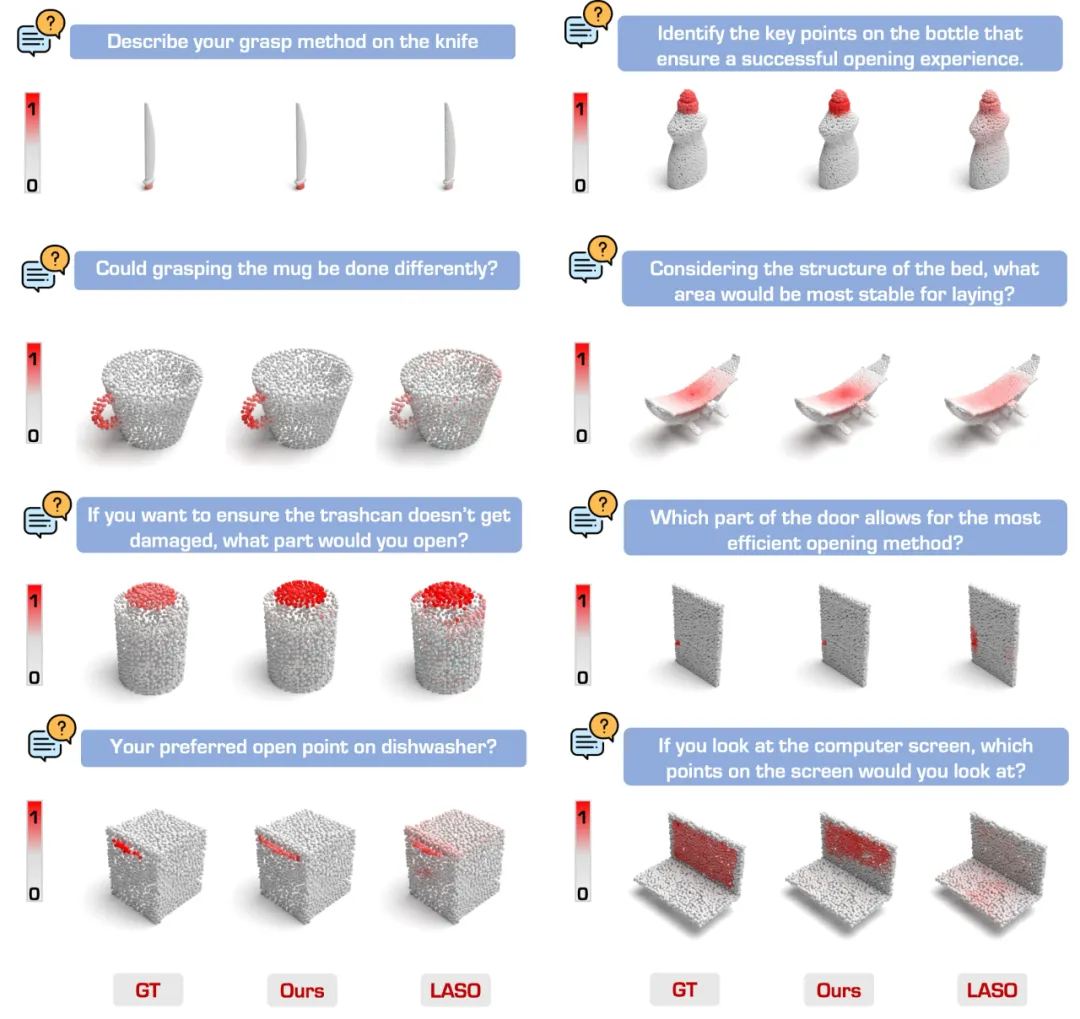
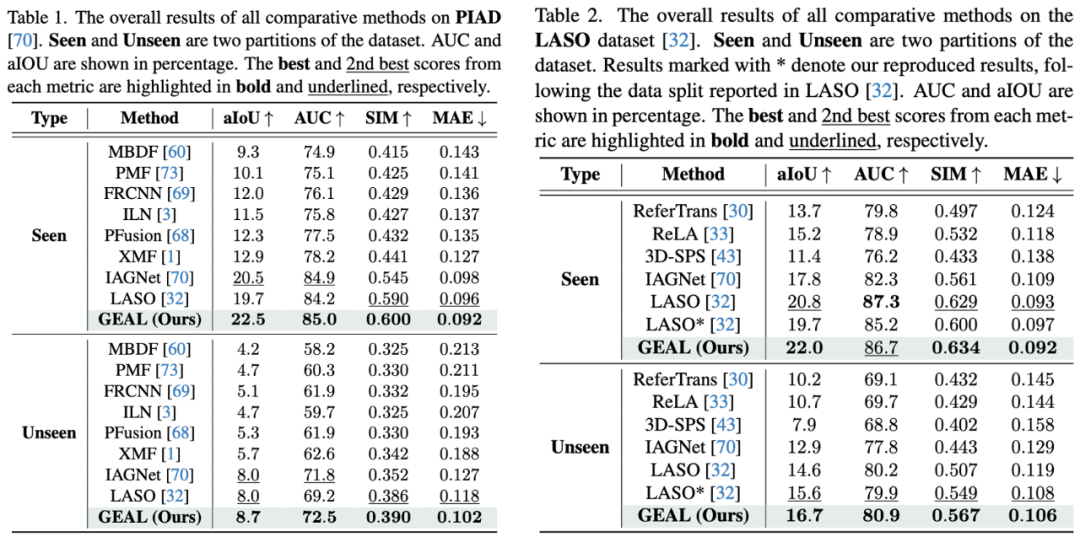
为评估 GEAL 在 3D 场景可交互区域预测上的整体表现,作者在主流数据集 PIAD 与 LASO 上进行了系统实验。结果显示,GEAL 相较现有最优方法均取得了更高分数,尤其在 unseen 类别测试中依然保持高准确率,证明其对未见过的物体形状与类别具备良好适应能力。这一优势主要得益于 2D 语义先验的充分利用,以及跨模态一致性带来的 2D-3D 特征对齐,使得模型能在几何细节与语义信息之间保持平衡。
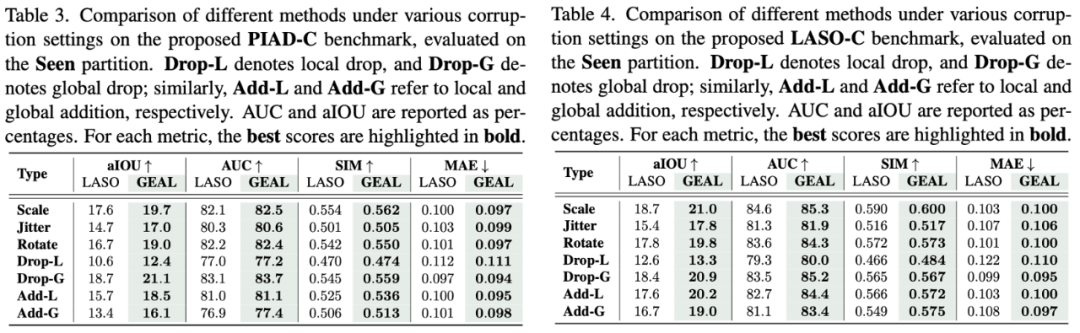
为了模拟实际感知场景中的各种干扰,如传感器噪声、局部丢失或随机旋转等,作者还在新提出的 Corrupt Data Benchmark 上对 GEAL 进行了测试。结果表明,即便在高度不确定的环境下,GEAL 依然能够稳定预测可交互区域,展现出优异的鲁棒性。这主要归功于 2D 分支在大规模预训练模型中的抗干扰特性,以及与 3D 分支通过一致性约束实现的高效信息传递。
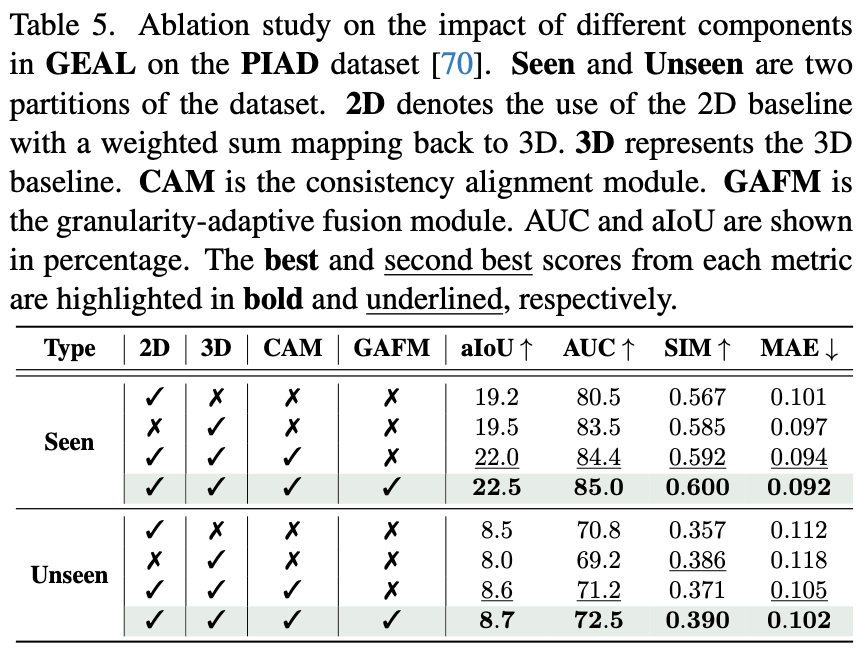
相比仅使用 2D 分支或 3D 分支的基础版本,融合双分支并加入 CAM 后,在未见类别和高噪声条件下的准确率均显著提升;进一步引入 GAFM 后,则在见类与未见类任务中同时提高精度与 IoU,说明多粒度特征融合对于捕捉局部细节和全局语义至关重要。
综上所述,多项实验结果与消融研究均验证了 GEAL 的有效性:该方法不仅在常规数据集上表现出卓越的精度与泛化能力,还能在真实干扰环境中保持稳健,展现出跨模态对齐与双分支架构在 3D 场景可交互区域预测中的强大潜力。
结论
综上所述,GEAL 通过双分支架构与 3D Gaussian Splatting 的巧妙结合,在不依赖大规模 3D 标注的情况下,充分挖掘了大规模 2D 预训练模型蕴含的丰富语义信息,实现了对 3D 场景可交互区域的精确预测。该成果为在机器人操作、增强现实和智能家居等领域中灵活、高效地获取三维可交互区域提供了新思路,对构建通用、稳健的 3D Affordance Learning 系统具有重要意义。
© THE END
转载请联系本公众号获得授权
投稿或寻求报道:liyazhou@jiqizhixin.com