清华大学推出VideoScene,一款“一步式”视频扩散模型,加速视频到3D场景的生成,大幅提升效率与质量,为相关应用带来新可能。
原文标题:CVPR 2025 HighLight|打通视频到3D的最后一公里,清华团队推出一键式视频扩散模型VideoScene
原文作者:机器之心
冷月清谈:
怜星夜思:
2、VideoScene在处理复杂场景时,如何避免物体漂移和结构坍塌等问题?除了动态降噪策略,还有什么其他的技术手段可以提升生成视频的稳定性?
3、VideoScene在实时游戏和自动驾驶等领域的应用前景如何?它可能面临哪些挑战?
原文内容


从视频到 3D 的桥梁:VideoScene 一步到位
随着 VR/AR、游戏娱乐、自动驾驶等领域对 3D 场景生成的需求不断攀升,从稀疏视角重建 3D 场景已成为一大热点课题。但传统方法往往需要大量图片、繁琐的多步迭代,既费时又难以保证高质量的 3D 结构重建。
来自清华大学的研究团队首次提出 VideoScene:一款 “一步式” 视频扩散模型,专注于 3D 场景视频生成。它利用了 3D-aware leap flow distillation 策略,通过跳跃式跨越冗余降噪步骤,极大地加速了推理过程,同时结合动态降噪策略,实现了对 3D 先验信息的充分利用,从而在保证高质量的同时大幅提升生成效率。

-
论文标题:VideoScene:Distilling Video Diffusion Model to Generate 3D Scenes in One Step
-
论文地址: https://arxiv.org/abs/2504.01956
-
项目主页: https://hanyang-21.github.io/VideoScene
-
Github 仓库: https://github.com/hanyang-21/VideoScene
稀疏视角重建方法挑战
在稀疏视角重建领域,从少量图像中精准恢复 3D 场景是个极具挑战性的难题。传统方法依赖多视角图像间的匹配与几何计算 ,但当视角稀疏时,匹配点不足、几何约束缺失,使得重建的 3D 模型充满瑕疵,像物体结构扭曲、空洞出现等。
为突破这一困境,一些前沿方法另辟蹊径,像 ReconX 就创新性地借助视频生成模型强大的生成能力,把重建问题与生成问题有机结合。它将稀疏视角图像构建成全局点云,编码为 3D 结构条件,引导视频扩散模型生成具有 3D 一致性的视频帧,再基于这些帧重建 3D 场景,在一定程度上缓解了稀疏视角重建的不适定问题。
不过,当前大多数 video to 3D 工具仍存在效率低下的问题。一方面,生成的 3D 视频质量欠佳,难以生成三维结构稳定、细节丰富、时空连贯的视频。在处理复杂场景时,模型容易出现物体漂移、结构坍塌等问题,导致生成的 3D 视频实用性大打折扣。另一方面,基于扩散模型的视频生成通常需要多步降噪过程,每一步都涉及大量计算,不仅耗时久,还带来高昂的计算开销,限制了其在实际场景中的应用。
继承与超越:ReconX 理念的进化
此前研究团队提出 video-to-3D 的稀释视角重建方法 ReconX,核心在于将 3D 结构指导融入视频扩散模型的条件空间,以此生成 3D 一致的帧,进而重建 3D 场景。它通过构建全局点云并编码为 3D 结构条件,引导视频扩散模型工作 ,在一定程度上解决了稀疏视角重建中 3D 一致性的问题。
VideoScene 继承了 ReconX 将 3D 结构与视频扩散相结合的理念,并在此基础上实现了重大改进,堪称 ReconX 的 “turbo 版本”。
在 3D 结构指导方面,VideoScene 通过独特的 3D 跃迁流蒸馏策略,巧妙地跳过了传统扩散模型中耗时且冗余的步骤,直接从含有丰富 3D 信息的粗略场景渲染视频开始,加速了整个扩散过程。同时也使得 3D 结构信息能更准确地融入视频扩散过程。在生成视频帧时,VideoScene 引入了更强大的动态降噪策略,不仅仅依赖于固定的降噪模式,而是根据视频内容的动态变化实时调整降噪参数,从而既保证了生成视频的高质量,又极大地提高了效率。

研究团队提出的 VideoScene 方法流程图
实验结果
通过在多个真实世界数据集上的大量实验,VideoScene 展示出了卓越的性能。它不仅在生成速度上远超现有的视频扩散模型,而且在生成质量上也毫不逊色,甚至在某些情况下还能达到更好的效果。这意味着 VideoScene 有望成为未来视频到 3D 应用中的一个重要工具。在实时游戏、自动驾驶等需要高效 3D 重建的领域,有潜力能发挥巨大的作用。
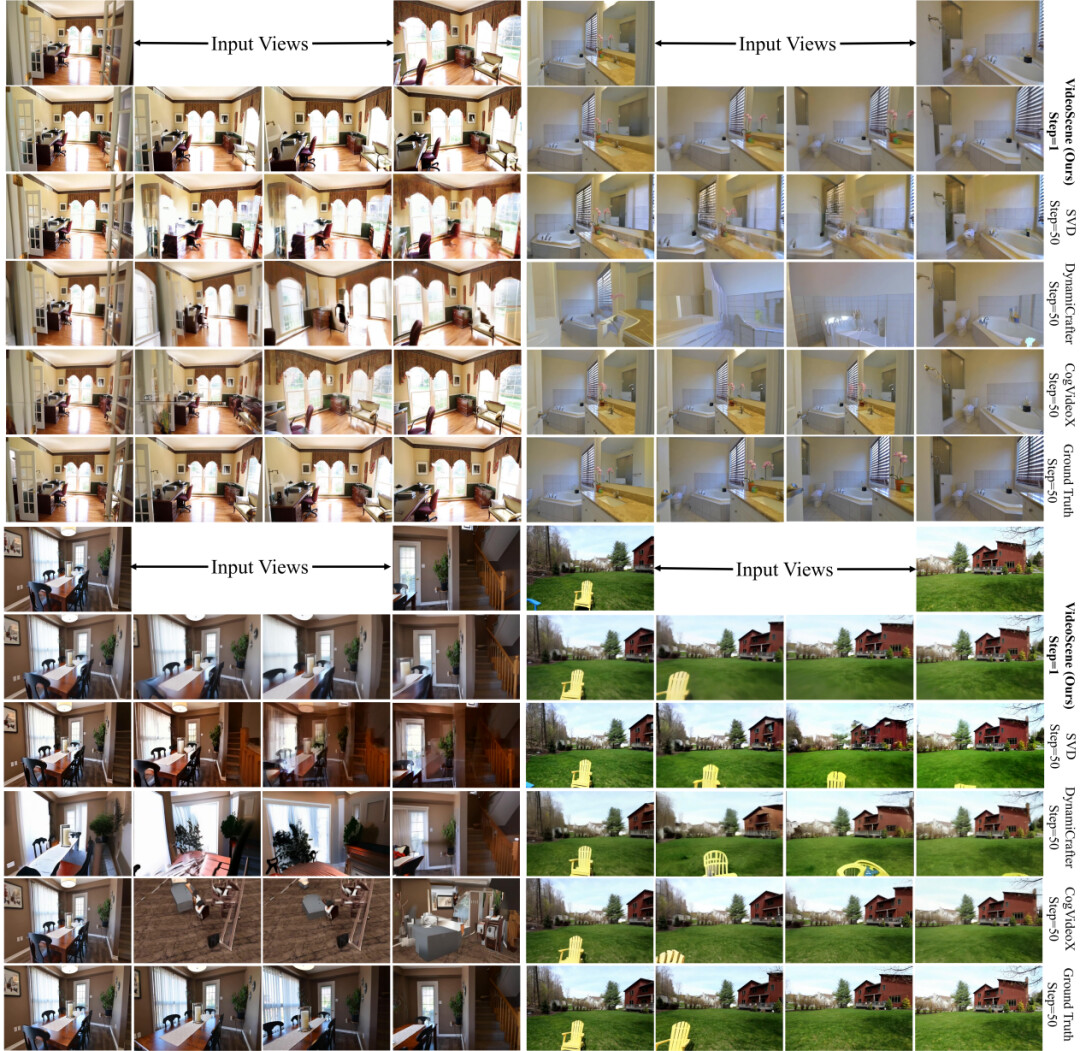
VideoScene 单步生成结果优于 baseline 模型 50 步生成结果

视频扩散模型在不同去噪步数下的表现
如果你对 VideoScene 感兴趣,想要深入了解它的技术细节和实验结果,可访问论文原文、项目主页和 GitHub 仓库。

© THE END
转载请联系本公众号获得授权
投稿或寻求报道:liyazhou@jiqizhixin.com