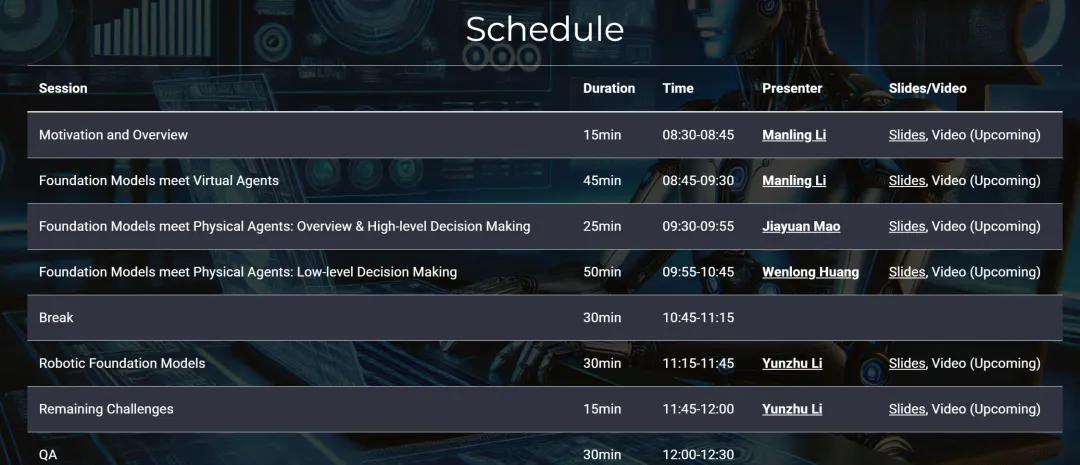
探讨基础模型如何演进为具身智能体,以及面临的挑战和未来的发展方向。
原文标题:【AAAI2025教程】基础模型与具身智能体的交汇
原文作者:数据派THU
冷月清谈:
本文探讨了基础模型在具身智能体发展中的作用,特别是大型语言模型如何赋能具身智能体实现目标解析、子目标分解和动作序列化。文章指出,理解低层次视觉细节和实现长时程推理是当前面临的主要挑战。教程将回顾现有具身智能体基础模型的范式,并基于马尔可夫决策过程(MDP)框架,研究机器人的决策过程。
怜星夜思:
1、大型语言模型(LLMs)在具身智能体中的应用已经很广泛了,那么你认为未来LLMs在具身智能体中还有哪些潜在的应用方向?
2、文章提到了马尔可夫决策过程(MDP)在机器人决策中的应用,但MDP在处理实际机器人任务时,经常会遇到状态空间爆炸的问题。大家有什么解决这个问题的思路吗?
3、从基础模型到具身智能体,视觉信息的理解至关重要。你认为未来视觉-语言-动作模型(Vision-Language-Action Models)在哪些方面可以进一步突破,以更好地支持具身智能体的发展?
2、文章提到了马尔可夫决策过程(MDP)在机器人决策中的应用,但MDP在处理实际机器人任务时,经常会遇到状态空间爆炸的问题。大家有什么解决这个问题的思路吗?
3、从基础模型到具身智能体,视觉信息的理解至关重要。你认为未来视觉-语言-动作模型(Vision-Language-Action Models)在哪些方面可以进一步突破,以更好地支持具身智能体的发展?
原文内容

来源:专知本文约1000字,建议阅读5分钟
本文将涵盖基础模型向大型语言模型、视觉-语言模型(Vision-Language Models)以及视觉-语言-动作模型(Vision-Language-Action Models)的演进。
基础模型与具身智能体的交汇
具身智能体是一种通用型智能体,能够接收人类的自然语言指令,并在多样化的环境中执行广泛的任务。近年来,大型语言模型(Large Language Models, LLMs)作为构建大型智能体模型(Large Agent Models)的强大工具崭露头角,在支持具身智能体实现目标解析、子目标分解、动作序列化以及状态转换建模(从前提到后效的因果转换)等能力方面取得了显著成功。
然而,从基础模型(Foundation Models)到具身智能体的发展过程中,理解低层次视觉细节以及实现长时程推理以支持可靠的具身决策,仍然面临重大挑战。本文将涵盖基础模型向大型语言模型、视觉-语言模型(Vision-Language Models)以及视觉-语言-动作模型(Vision-Language-Action Models)的演进。在本教程中,我们将全面回顾现有具身智能体基础模型的范式,并基于机器人学习的基本数学框架——马尔可夫决策过程(Markov Decision Process, MDP),聚焦其不同的形式化方法,同时提供一个结构化视角来研究机器人的决策过程。