Meta与牛津大学推出VGGT,一种基于Transformer的通用3D视觉模型,无需后处理即可高效完成3D重建任务,或将开启3D视觉基础模型时代。
原文标题:3D基础模型时代开启?Meta与牛津大学推出VGGT,一站式Transformer开创高效3D视觉新范式
原文作者:机器之心
冷月清谈:
怜星夜思:
2、VGGT 采用纯前馈 Transformer 架构,并在多个 3D 任务中超越了传统优化方法。那么,这种纯前馈架构在 3D 视觉任务中相比于其他架构(例如包含循环连接的 RNN 或 LSTM)的优势是什么?
3、VGGT 在单目重建任务中表现出强大的泛化能力,即使没有经过专门训练也能达到接近 SOTA 的水平。那么,未来是否有可能基于 VGGT 构建一个通用的 3D 视觉基础模型,可以应用于各种不同的 3D 任务,例如自动驾驶、机器人导航、AR/VR 等?
原文内容

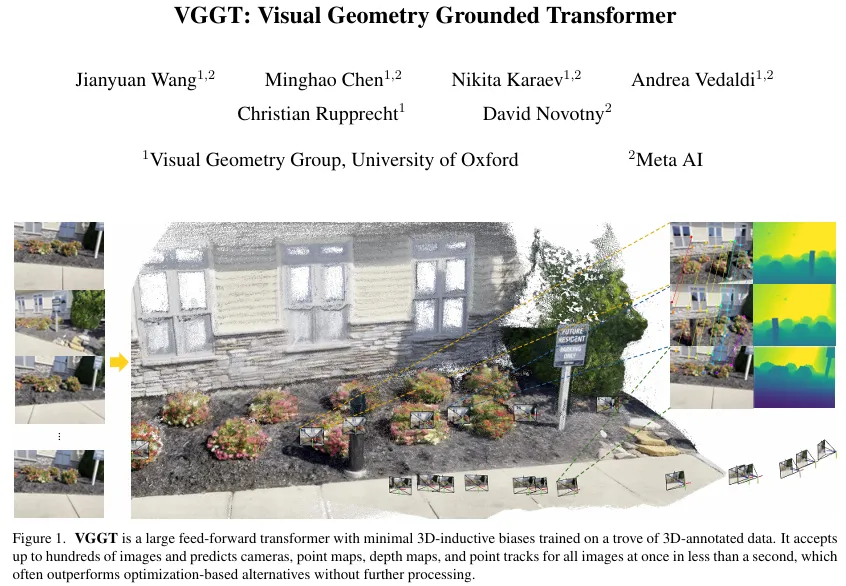
「仅需一次前向推理,即可预测相机参数、深度图、点云与 3D 轨迹 ——VGGT 如何重新定义 3D 视觉?」
3D 视觉领域正迎来新的巨变。牛津大学 VGG (Visual Geometry Group) 与 Meta AI 团队联合发布的最新研究 VGGT(Visual Geometry Grounded Transformer),提出了一种基于纯前馈 Transformer 架构的通用 3D 视觉模型,能够从单张、多张甚至上百张图像中直接推理出相机内参、外参、深度图、点云及 3D 点轨迹等核心几何信息。无需任何后处理优化,该模型已经在多个 3D 任务中性能显著超越传统优化方法与现有 SOTA 模型,推理速度可达秒级。这一研究打破了过去 3D 任务依赖繁琐几何迭代优化的传统范式,展示了 “越简单,越有效” 的强大潜力。
-
论文标题:VGGT: Visual Geometry Grounded Transformer
-
论文链接:https://arxiv.org/abs/2503.11651
-
代码链接:https://github.com/facebookresearch/vggt
-
演示平台:https://huggingface.co/spaces/facebook/vggt
打破传统范式:从迭代优化到端到端推理
传统 3D 重建技术高度依赖束调整(Bundle Adjustment, BA)等几何优化方法,需反复迭代且计算成本高昂。尽管近年来机器学习被引入辅助优化,但仍难以摆脱复杂后处理的桎梏。VGGT 开创性地采用纯前馈设计:通过大规模 3D 标注数据与 Transformer 架构的结合,模型在一次前向传播中即可完成全部几何推理任务。实验表明,即便输入数百张图像,VGGT 仍能在数秒内输出高质量结果,在精度与速度上均超越传统优化方法。
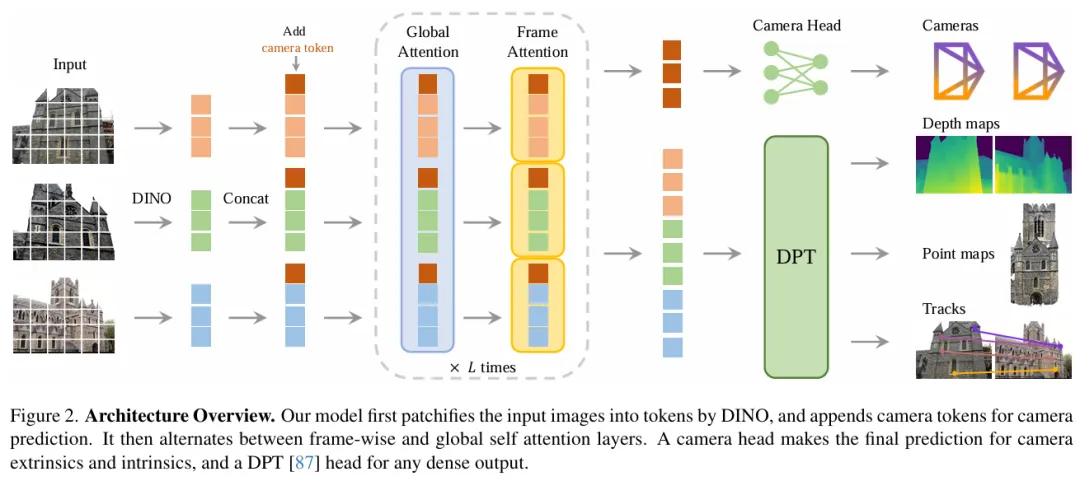
研究团队指出,VGGT 的成功并非源于复杂的结构设计或领域先验,而是得益于 Transformer 架构的通用性与大规模 3D 数据训练的协同效应。模型将输入图像转化为 Tokens 后,与随机初始化的相机 Tokens 共同输入交替注意力模块(Alternating-Attention),通过全局与帧级自注意力层的交替堆叠,逐步融合多视图几何信息。最终,相机参数经专用头部解码,图像 Tokens 则通过 DPT 头部生成密集预测(如深度图与点图)。值得一提的是,VGGT 仅使用自注意力机制(self attention),未使用跨注意力(cross attention)。
同时,为保持输入图像的置换不变性(改变输入图像顺序不改变预测结果),VGGT 摒弃了帧索引 (frame index) 位置编码。相反,VGGT 仅通过帧级自注意力机制动态关联同一图像的 Tokens。这种设计不仅使得模型无需依赖预设位置信息即可区分多视图数据,更赋予模型强大的泛化能力 —— 即便训练时仅使用 2-24 帧数据,测试时亦可轻松处理超过 200 帧的输入。VGGT 收集了 17 个大型 3D 数据集一起进行训练,在 64 块 A100GPU 上共耗时 9 天。
性能与泛化性双突破
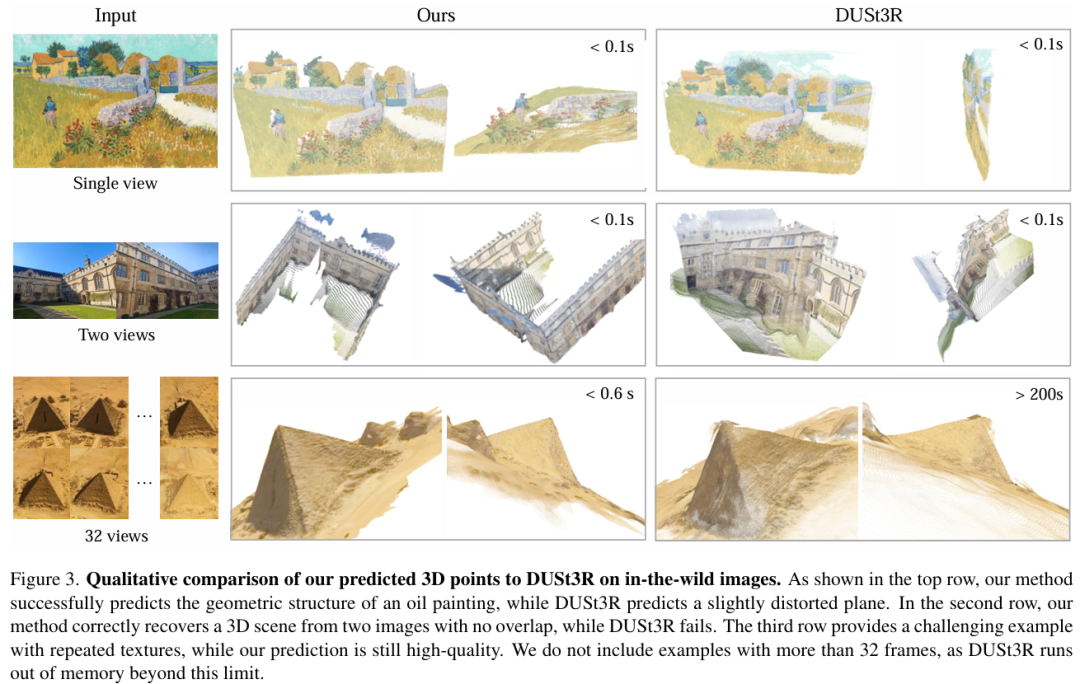
定性演示视频显示,VGGT 能轻松应对不同数量图像及复杂场景的重建。同时,研究人员提供了与过去 SOTA 的定性比较。VGGT 可精准重建梵高油画等非真实场景的几何结构,甚至能处理无重叠视图或重复纹理的极端案例。用户可通过 Hugging Face Demo 上传图像,实时体验 3D 重建效果。
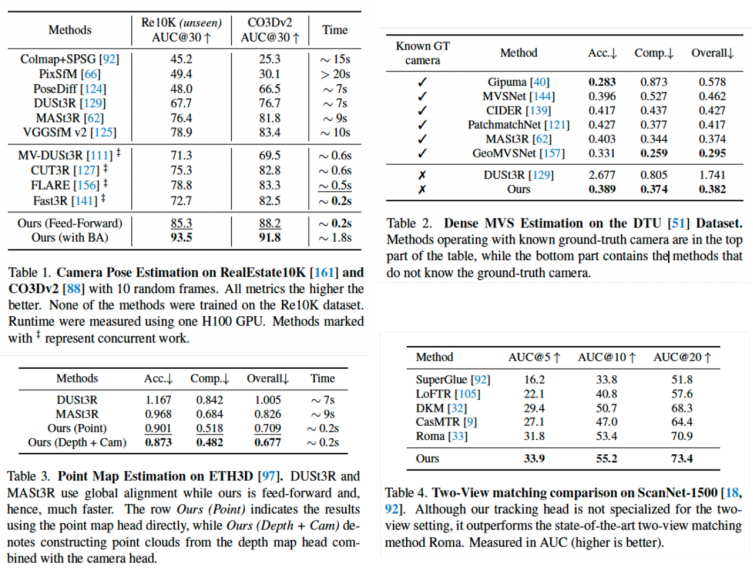
在定量实验中,VGGT 无需任何后处理即在相机姿势估计,多视图深度估计、点云重建等任务中全面领先,其推理速度较传统方法提升近 50 倍。即便与同期 CVPR 2025 的 Transformer-based 重建模型相比,VGGT 性能优势明显,并与速度最快的 Fast3R 相当。有趣的是,研究团队还意外发现,利用模型预测的深度图与相机参数反投影生成的点云,其质量甚至超过直接回归的点图,这一现象揭示了模型对几何一致性内在规律的自发学习能力。
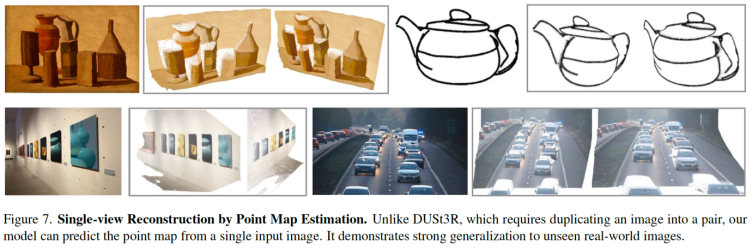
跨任务泛化的潜力 - 单目重建
尽管 VGGT 从未接受单图训练,但仍展现出强大的跨任务泛化能力。研究团队公布的单图重建定性结果显示,VGGT 在未专门训练的单目任务中表现出色。
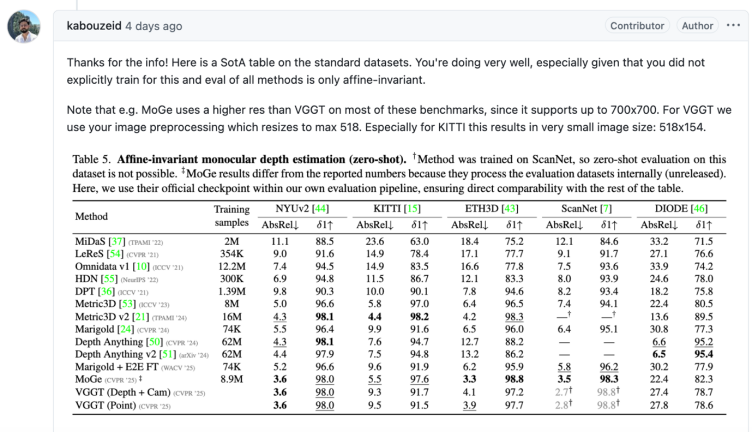
VGGT 的代码和模型公开后,迅速有 github 社区成员跟进,在标准的单目设置下进行测试。GitHub 社区测试显示,VGGT 在 NYU V2 等数据集上的表现已逼近单目 SOTA 水平,这一「意外之喜」进一步印证了 VGGT 作为通用 3D 基础模型的潜力。
结语
视觉重建作为所有 3D 任务的核心,VGGT 的成功标志着 3D 视觉领域或许即将迎来一个全新的,基础模型的时代。正如论文作者所述,我们正在见证视觉几何从 「手工设计」到「数据驱动」的范式迁移,而这可能仅仅是个开端。「简单架构 + 数据驱动」的模式是否能如 2D 视觉和 NLP 领域般彻底重塑 3D 任务?让我们拭目以待。
作者介绍:论文第一作者王建元为牛津大学视觉几何组(VGG)与Meta AI的联合培养博士生(博士三年级),长期致力于3D重建方法研究。其博士工作聚焦于端到端几何推理框架的创新,曾主导开发PoseDiffusion、VGGSfM,以及本次提出的通用3D基础模型VGGT,相关成果均发表于CVPR、ICCV等顶级会议,推动了数据驱动式3D重建技术的演进。