人形机器人“翻”战正酣!波士顿动力 Atlas 迎战宇树、众擎,侧空翻、前空翻各显神通。强化学习加持,未来已来?
原文标题:波士顿动力真「翻」不过宇树、众擎!一觉醒来,全世界的机器人都在侧空翻
原文作者:机器之心
冷月清谈:
宇树机器人率先发布人形机器人侧空翻视频,波士顿动力紧随其后发布 Atlas 视频,展示侧空翻等动作,引发网友热议。文章通过对比波士顿动力 Atlas 和宇树 G1 的侧空翻动作,指出 Atlas 依赖双手撑地,而 G1 可实现凌空侧空翻。文章还介绍了波士顿动力与 RAI Institute 合作,采用强化学习策略加速 Atlas 行为生成的过程,强调了强化学习在机器人领域的关键作用。
怜星夜思:
1、波士顿动力 Atlas 的“翻”更像“侧手翻”,宇树 G1 才是真正的“侧空翻”,你觉得这种区分重要吗?会影响人形机器人的发展方向吗?
2、文章提到强化学习在人形机器人中的应用,模拟器中训练 1.5 亿次,零样本迁移到硬件。你认为目前强化学习在机器人领域的应用还存在哪些挑战?
3、如果让你来设计一个人形机器人,除了“翻”这些花哨的动作,你认为最应该优先考虑哪些实用功能?
2、文章提到强化学习在人形机器人中的应用,模拟器中训练 1.5 亿次,零样本迁移到硬件。你认为目前强化学习在机器人领域的应用还存在哪些挑战?
3、如果让你来设计一个人形机器人,除了“翻”这些花哨的动作,你认为最应该优先考虑哪些实用功能?
原文内容
机器之心报道
编辑:Panda、蛋酱
波士顿动力Atlas不语,只是一味双手撑地翻跟斗。
昨天,宇树机器人发布了一段视频,宣布首次让人形机器人实现了侧空翻,吸睛无数。
而就在这段视频发出后不到 12 小时,波士顿动力也发布了一段视频,其中不仅同样演示了机器人侧空翻这一动作,还表演了其它看起来非常近似人类的动作。
网友惊呼:这是美国对宇树和众擎机器人的回应。

也有网友表示,其动作的流畅程度超乎想象,更有人说 Atlas 的动作比作为人类的他还更加灵活。
到底行不行?咱们将动作分解开来看看:
视频一开始,机器人先表演了一个「没事儿走两步」,徐徐入场。

掉转头,它突然开始加速跑:

突然就开始阴暗爬行:
之后又是一个好像有点站不稳的战术翻滚:
请注意接下来这个向前翻的动作,Atlas 必须用双手撑住地面,才敢开始下一步动作:
看了好几遍之后,总觉得哪里怪怪的,调成 0.5 倍速才发现,它只有下半身翻过来了,上半身还是原先的方向……
对比前几天众擎家的「前空翻」:
开始尬舞了,这似魔鬼的步伐:
有人打趣道,它的霹雳舞动作至少不是世界上最糟糕的表演。你可能还记得,在去年的巴黎奥运会上,澳大利亚选手 Rachael Gunn 的「跳大神级」表演:
最终,她获得了 9 位裁判中的 0 票支持,输掉了比赛却赢得了广泛的知名度。
如果我们将 Atlas 送上奥运赛场,Rachael Gunn 又该如何应对?
最后便是侧空翻,同样与宇树 G1 对比一下:
可以看到,波士顿动力 Altas 在执行侧空翻动作时同样使用了双手撑地这个动作(严格意义上这已经不能算是「空翻」,只能算是侧手翻),而 G1 则完全是凌空侧空翻。至少从这一点看,宇树 G1 要更胜一筹。
强化学习至关重要
波士顿动力表示,Atlas 演示的是「使用动作捕捉服开发的强化学习策略」。而该策略是波士顿动力与 RAI Institute 一起合作开发的,而后者的「使命是解决 AI 和机器人领域最重要和基本的难题」。

RAI Institute 则在自家 𝕏 帐号上分享了稍微更多一些细节。
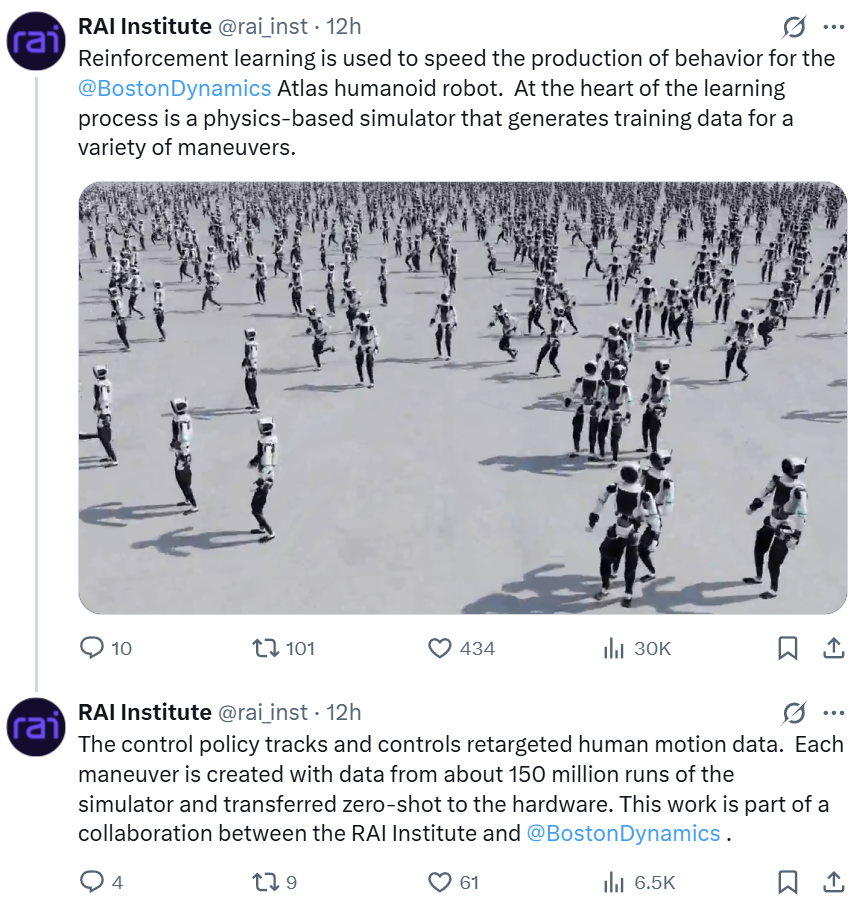
这家公司表示,强化学习的作用是加速波士顿动力 Atlas 人形机器人的行为生成。其学习过程的核心是基于物理的模拟器 —— 它可以为各种动作生成训练数据。
比如匍匐前进:
连续侧空翻 + 后空翻

又或者举门而入(从这个模拟机器人扭动的情况看,这门应该挺重的):
RAI Institute 表示其控制策略是通过跟踪和控制重新定位的人体运动数据构建的,并且每个动作都首先让模拟器运行了大约 1.5 亿次,并可以零样本地传输到硬件 —— 也就是说无需再在硬件上继续训练或调整。

我们知道,现今推理模型的成功就离不开强化学习,而强化学习也已经开始在更多领域开疆拓土,比如蛋白质折叠和药物设计、芯片设计自动化等等。
对于这段视频预示的未来,你做好准备了吗?

© THE END
转载请联系本公众号获得授权
投稿或寻求报道:liyazhou@jiqizhixin.com